Safety and Efficiency in Autonomous Vehicles through Online Learning
Zachary Sunberg
What's the most important objective for an autonomous system?
Safety
What's the enemy of safety?
Uncertainty
What happens when we deploy autonomous systems? (Even when we have safety in mind)
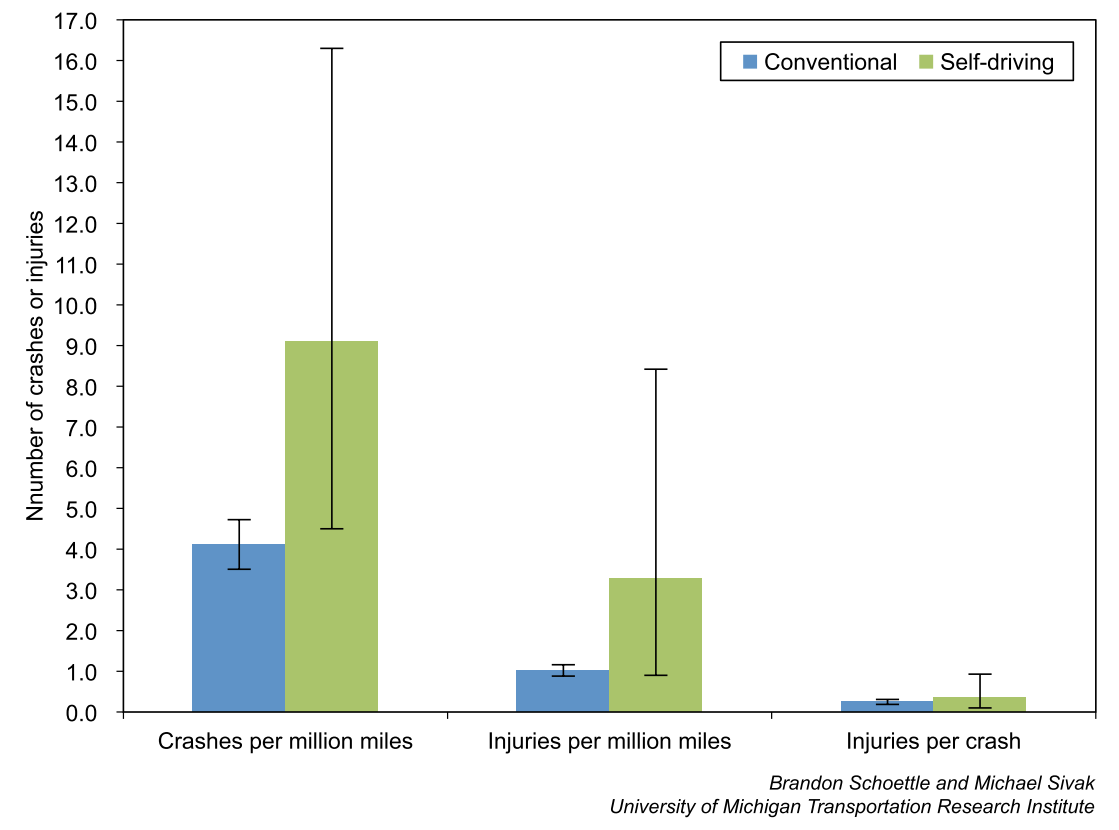
Shoettle and Sivak, "A Preliminary Analysis of Real-World Crashes Involving Self-Driving Vehicles" UMTRI-2015-34
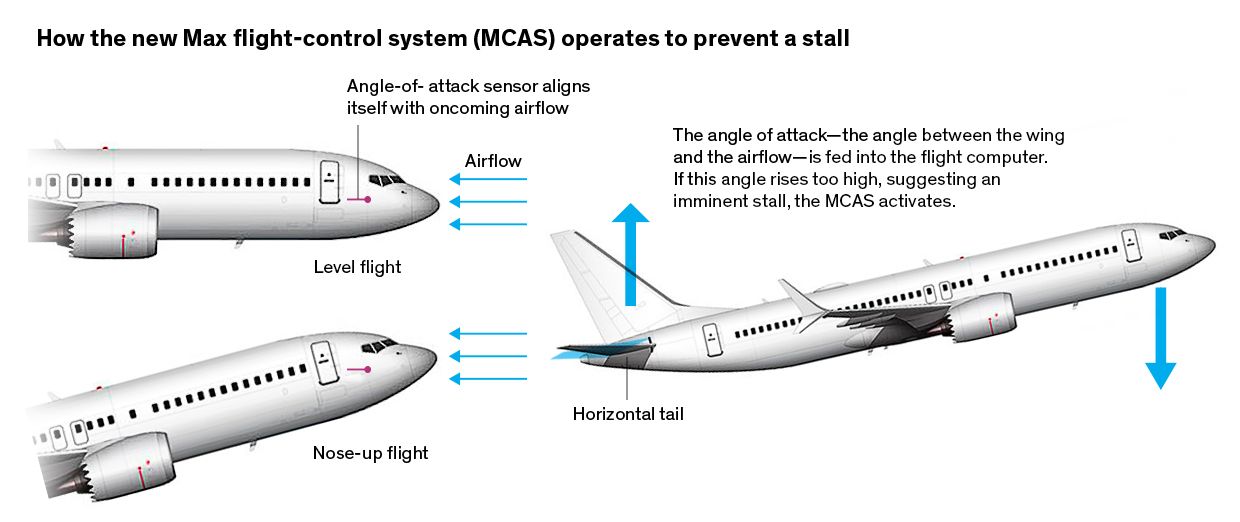
737 Max
Uber Crash

Two Objectives for Autonomy
EFFICIENCY
SAFETY
Minimize resource use
(especially time)
Minimize the risk of harm to oneself and others


Safety often opposes Efficiency
Pareto Optimization
Safety
Better Performance
Model \(M_2\), Algorithm \(A_2\)
Model \(M_1\), Algorithm \(A_1\)
Efficiency
$$\underset{\pi}{\mathop{\text{maximize}}} \, V^\pi = V^\pi_\text{E} + \lambda V^\pi_\text{S}$$
Safety
Weight
Efficiency
Tweet by Nitin Gupta
29 April 2018
https://twitter.com/nitguptaa/status/990683818825736192




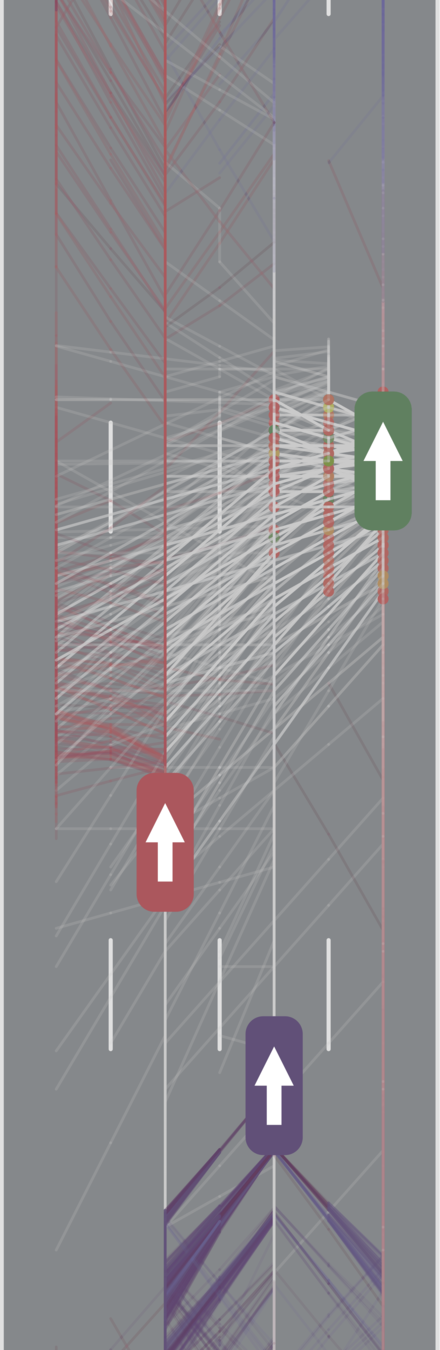
Overconfident MDP

Conservative MDP
Multiple lane change simulation results
[Sunberg, 2017]

Types of Uncertainty
OUTCOME
MODEL
STATE




All drivers normal

No learning (MDP)
Omniscient
Simulation results
[Sunberg, 2017]



POMCP
POMCP-DPW
POMCPOW
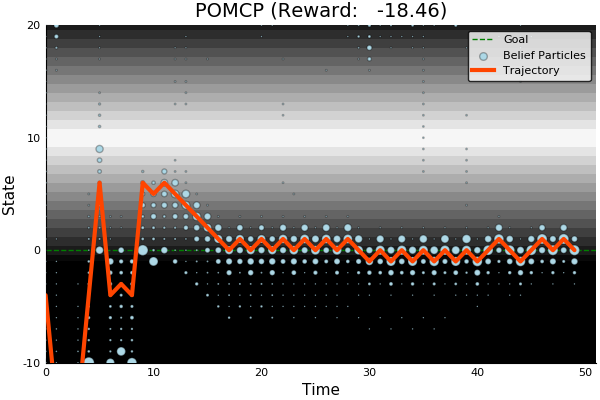
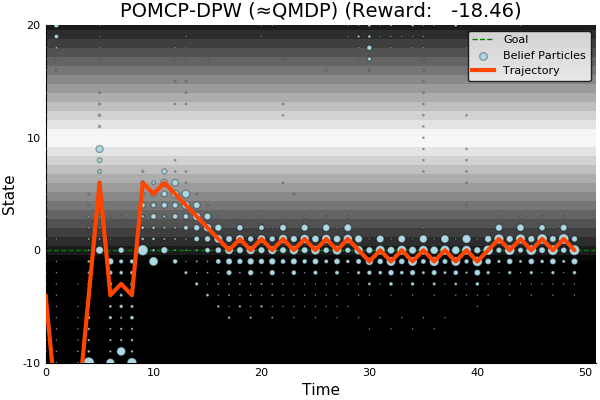
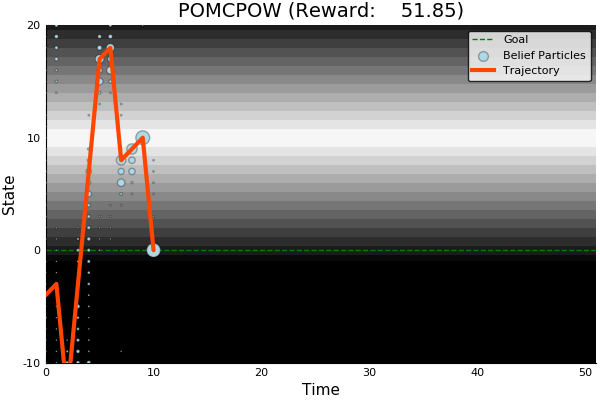
(Silver, 2010)
(Sunberg, 2017)
(Sunberg, 2018)
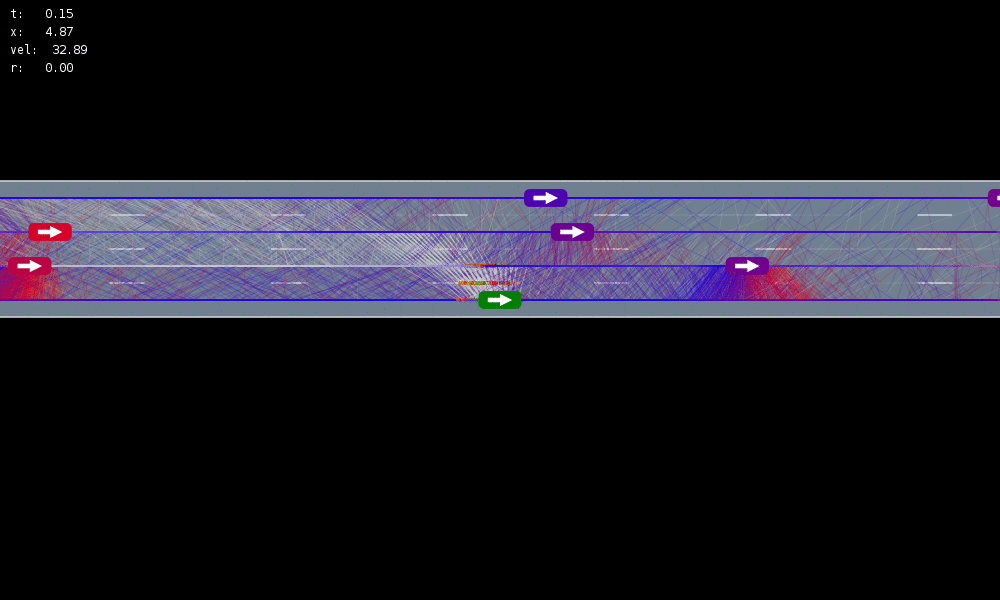

All drivers normal

No learning (MDP)
Omniscient
POMCPOW (Ours)
Simulation results
[Sunberg, 2017]
Next
- New Algorithms
- New Sources of Uncertainty
- POMDPs in the Real World
New Algorithms

New Sources of Uncertainty

Thank You!

POMDPs in the real world
Quick Interview Slides
By Zachary Sunberg



