Safe and Effective
Autonomous Vehicles
Zachary Sunberg
Professor
CU Boulder
I Love Aerospace!





I work on Autonomous Robots

Waymo Image By Dllu - Own work, CC BY-SA 4.0, https://commons.wikimedia.org/w/index.php?curid=64517567


What happens when a helicopter's engine stops?
Autorotation

How do you control a helicopter?

Blade Pitch

Blade Flapping


Swash Plate
Autorotation Controller

Test Helicopter



Making Cars Safe

- Each year, more than 3 million people in the US are injured in car crashes
- Every day, on average more than 100 people die in car crashes
Tweet by Nitin Gupta
29 April 2018
https://twitter.com/nitguptaa/status/990683818825736192
Two Objectives for Autonomy
EFFICIENCY
SAFETY
Minimize resource use
(especially time)
Minimize the risk of harm to oneself and others


Safety often opposes Efficiency
Decision-Making Algorithms

Homework on a Saturday???
Tree Search
Do Homework
Watch Youtube
Watch Super Bowl!
Do Homework
Turn In Homework
Homework Incomplete
Watch Super Bowl!
Turn In Homework
Saturday
Sunday
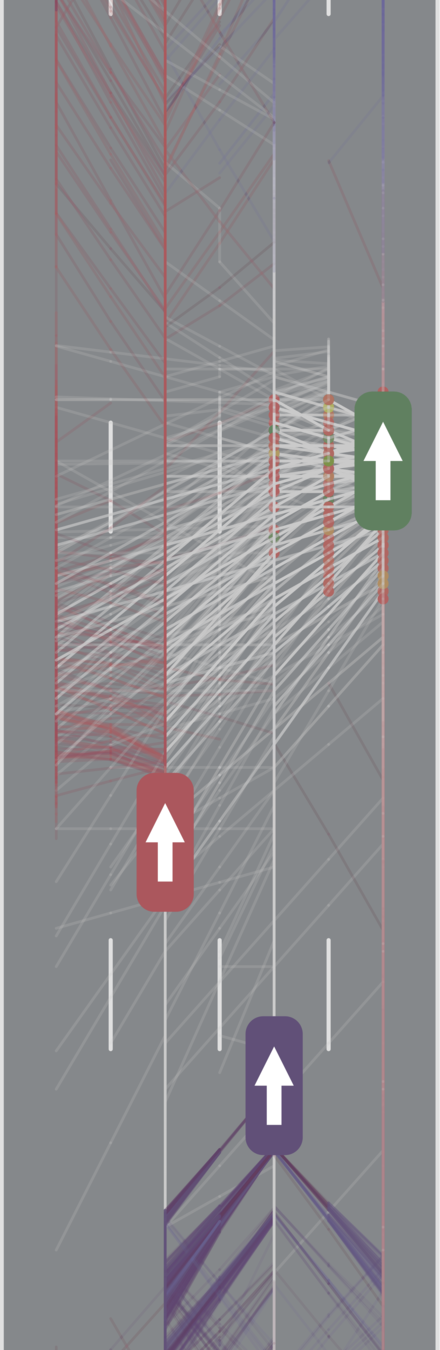
Turn Left
Go Straight
Turn Right
Crash
Destination
L
Straight
R
L
Straight
R
L
Straight
R
L
Straight
R

Partially Observable Markov Decision Process
(POMDP)

Search and Rescue with Small Uncrewed Aerial Vehicles




AI in Aerospace



1) ACAS
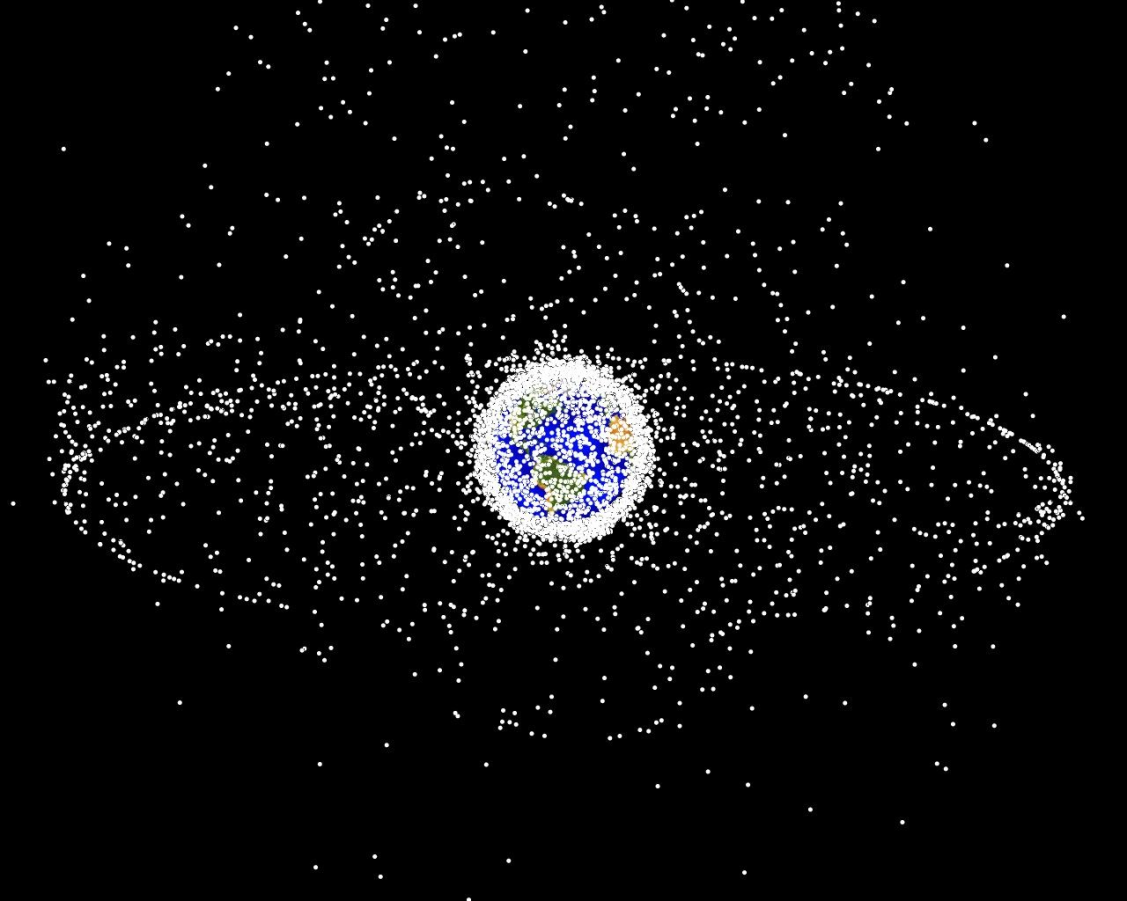
2) Orbital Object Tracking
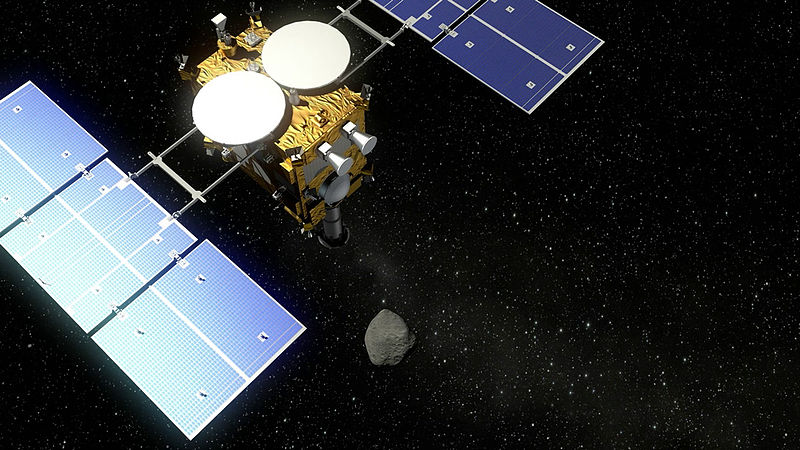
4) Asteroid Navigation
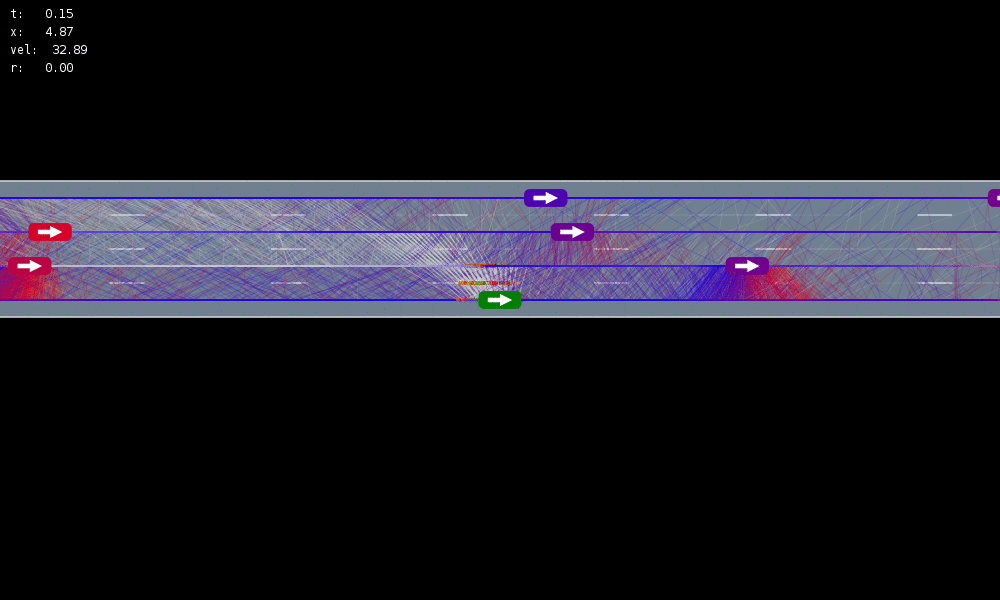
3) Dual Control
ACAS X
Trusted UAV
Collision Avoidance
[Sunberg, 2016]
[Kochenderfer, 2011]
AI in Aerospace
\(\mathcal{S}\): Information space for all objects
\(\mathcal{A}\): Which objects to measure
\(R\): - Entropy
Approximately 20,000 objects >10cm in orbit
1) ACAS
2) Orbital Object Tracking
4) Asteroid Navigation
3) Dual Control
AI in Aerospace


State \(x\) Parameters \(\theta\)
\(s = (x, \theta)\) \(o = x + v\)
POMDP solution automatically balances exploration and exploitation
1) ACAS
2) Orbital Object Tracking
4) Asteroid Navigation
3) Dual Control
AI in Aerospace
Dynamics: Complex gravity field, regolith
State: Vehicle state, local landscape
Sensor: Star tracker?, camera?, accelerometer?
Action: Hopping actuator
[Hockman, 2017]
1) ACAS
2) Orbital Object Tracking
4) Asteroid Navigation
3) Dual Control
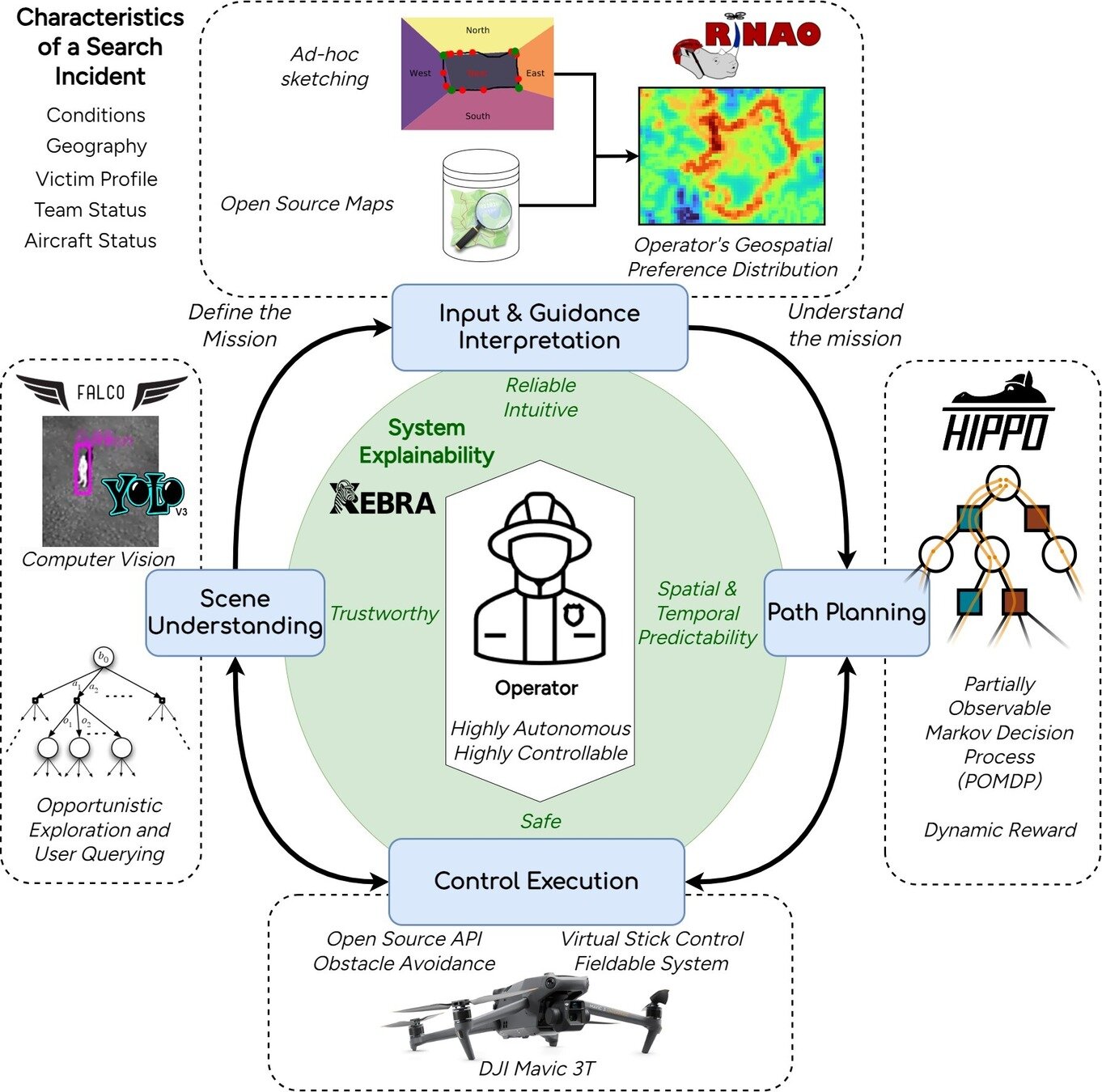


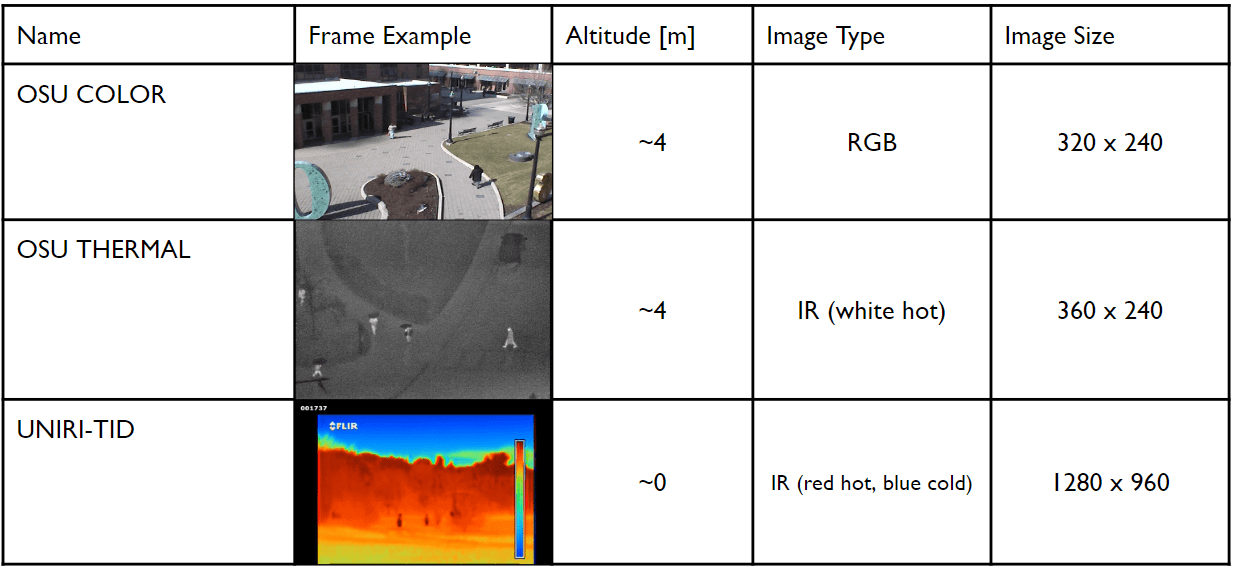
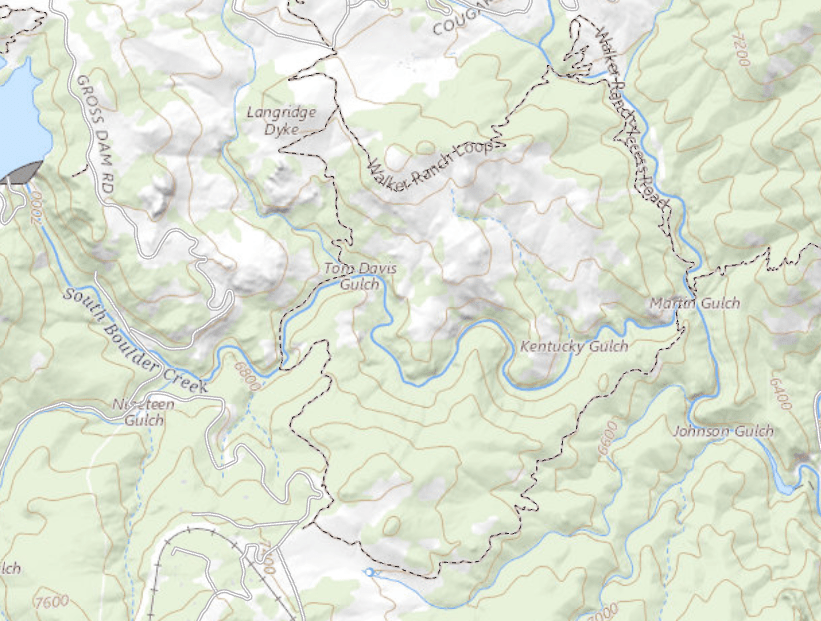
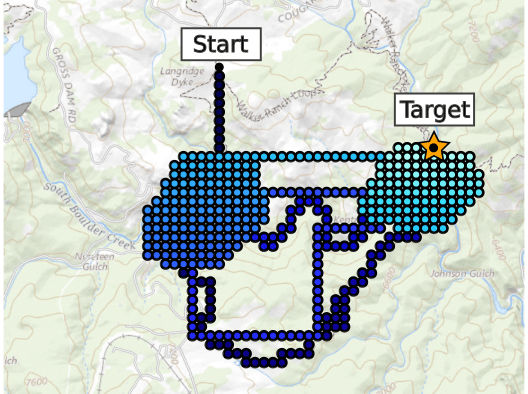
Search and Rescue with Small Uncrewed Aerial Vehicles
Search and Rescue with Small Uncrewed Aerial Vehicles





[Diallo, MS Thesis, 2024]
Neural Networks
\[f(x) = \sigma(W_2 \, \sigma(W_1 x + b_1) + b_2)\]

Image
\((x)\)
"Human here"
[Diallo, MS Thesis, 2024]
Neural Networks
\[f(x) = \sigma(W_2 \, \sigma(W_1 x + b_1) + b_2)\]
Image
\((x)\)
Baseline
Our POMDP Planner

[Ray, Laouar, Sunberg, & Ahmed, ICRA 2023]
Search and Rescue with Small Uncrewed Aerial Vehicles
Thank You!