What else am I doing?
Adversarial Policies in POMDPs
Professor Zachary Sunberg
University of Colorado Boulder
CAAMS Winter '25 IAB Meeting
Autonomous Decision and Control Laboratory

-
Algorithmic Contributions
- Scalable algorithms for partially observable Markov decision processes (POMDPs)
- Motion planning with safety guarantees
- Game theoretic algorithms
-
Theoretical Contributions
- Particle POMDP approximation bounds
-
Applications
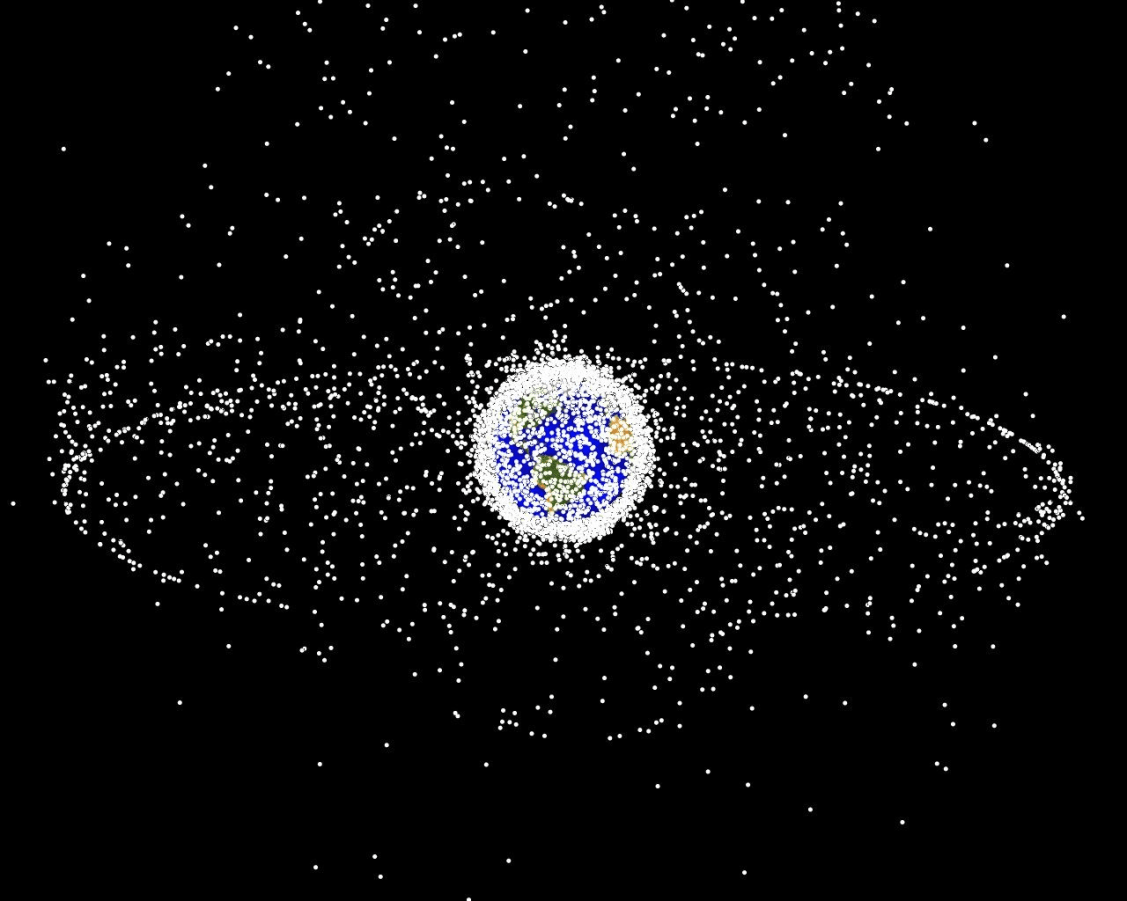
- Space Domain Awareness
- Autonomous Driving
- Autonomous Aerial Scientific Missions
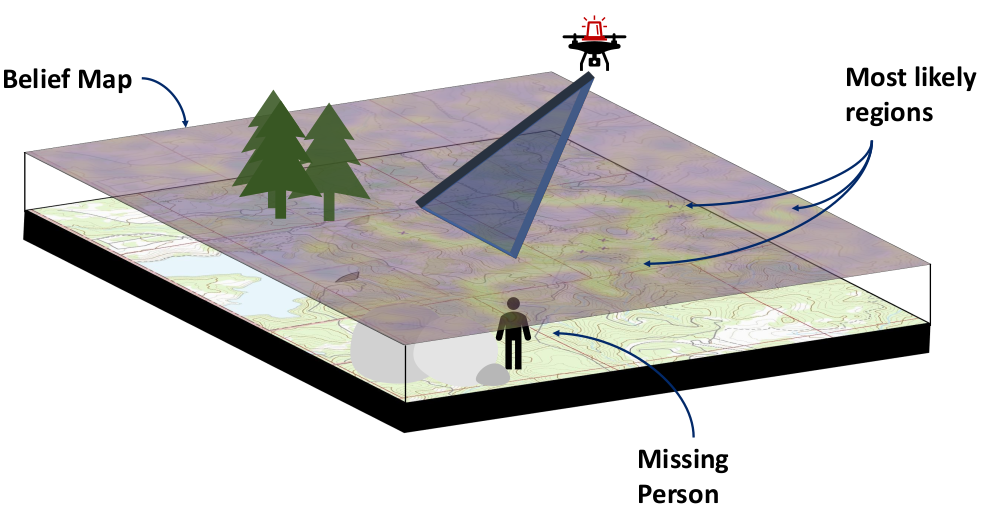
- Search and Rescue
- Space Exploration
- Ecology
-
Open Source Software
- POMDPs.jl Julia ecosystem

PI: Prof. Zachary Sunberg

PhD Students






Postdoc



Markov Decision Process (MDP)
- \(\mathcal{S}\) - State space
- \(T(s' \mid s, a)\) - Transition probability distribution
- \(\mathcal{A}\) - Action space
- \(R(s, a)\) - Reward

Aleatory

\([x, y, z,\;\; \phi, \theta, \psi,\;\; u, v, w,\;\; p,q,r]\)
\(\mathcal{S} = \mathbb{R}^{12}\)
\(\mathcal{S} = \mathbb{R}^{12} \times \mathbb{R}^\infty\)
\[\underset{\pi:\, \mathcal{S} \to \mathcal{A}}{\text{maximize}} \quad \text{E}\left[ \sum_{t=0}^\infty R(s_t, a_t) \right]\]
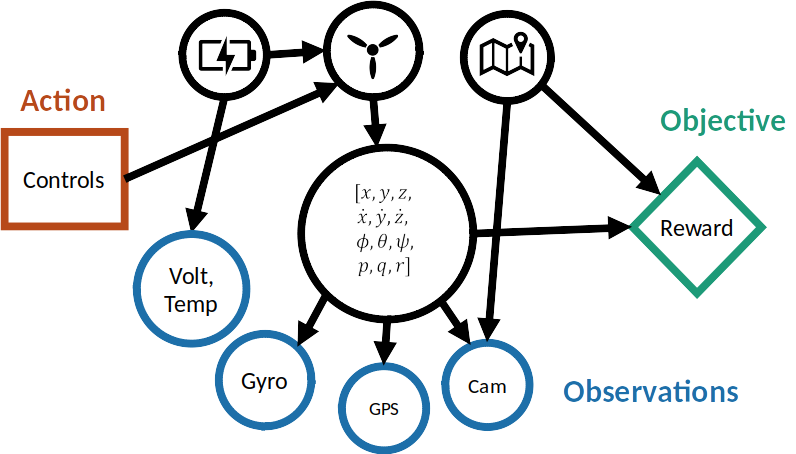
Partially Observable Markov Decision Process (POMDP)

- \(\mathcal{S}\) - State space
- \(T(s' \mid s, a)\) - Transition probability distribution
- \(\mathcal{A}\) - Action space
- \(R(s, a)\) - Reward
- \(\mathcal{O}\) - Observation space
- \(Z(o \mid a, s')\) - Observation probability distribution
Aleatory
Epistemic (Static)
Epistemic (Dynamic)
\([x, y, z,\;\; \phi, \theta, \psi,\;\; u, v, w,\;\; p,q,r]\)
\(\mathcal{S} = \mathbb{R}^{12}\)
\(\mathcal{S} = \mathbb{R}^{12} \times \mathbb{R}^\infty\)
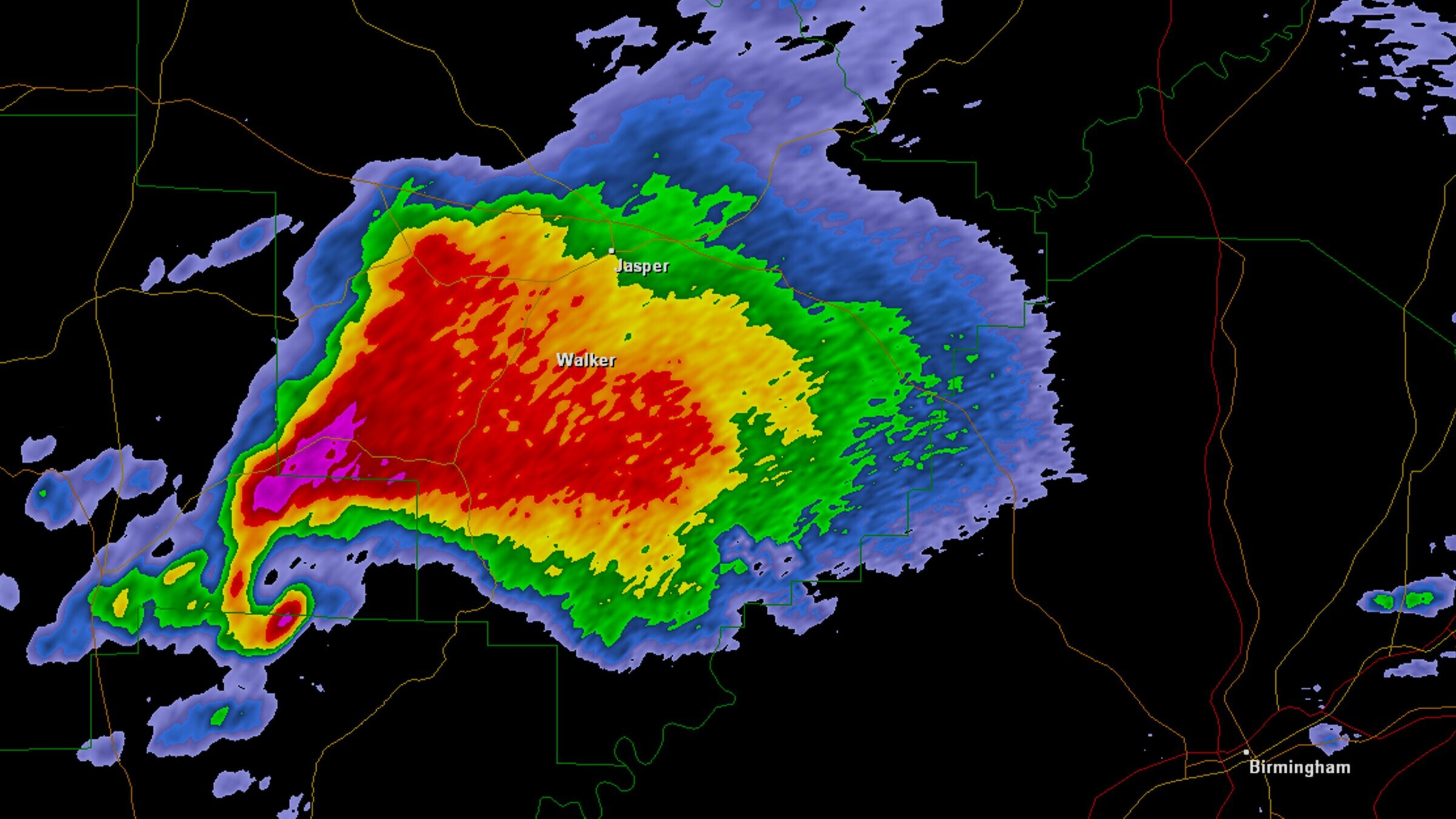
Examples of POMDPs



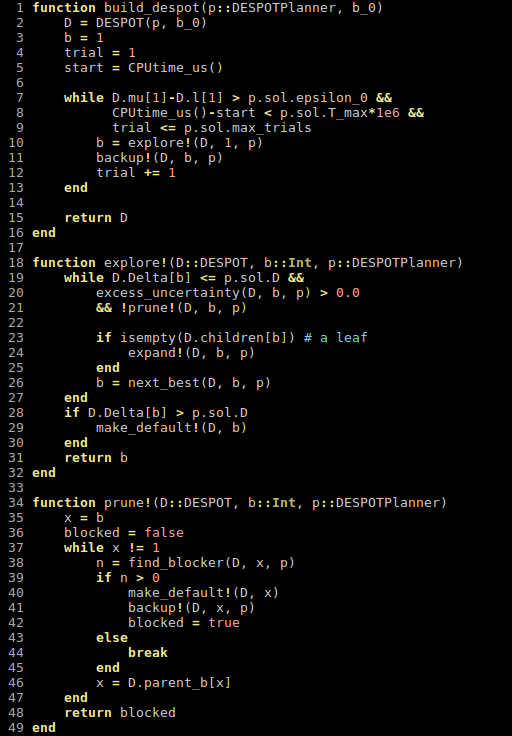
How Our POMDP Algorithms Work
1. Low-sample particle filtering
2. Sparse Sampling

[Lim, Becker, Kochenderfer, Tomlin, & Sunberg, JAIR 2023; Sunberg & Kochenderfer, ICAPS 2018; Others]
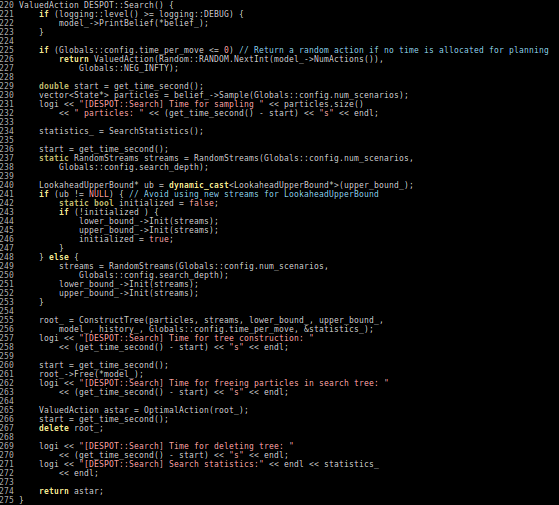
Solving a POMDP
Environment
Belief Updater
Planner
\(a = +10\)

\(b\)
\[b_t(s) = P\left(s_t = s \mid b_0, a_0, o_1 \ldots a_{t-1}, o_{t}\right)\]

\[ = P\left(s_t = s \mid b_{t-1}, a_{t-1}, o_{t}\right)\]
\(Q(b, a)\)
True State
\(s = 7\)
Observation \(o = -0.21\)
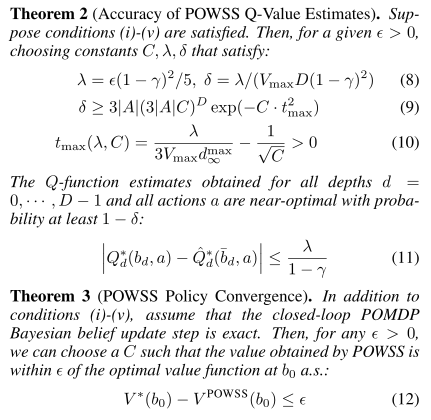
Key Theoretical Breakthrough
- Solving POMDPs exactly is intractable (PSPACE-Complete / NP-hard) [Papadimitriou, 1987]
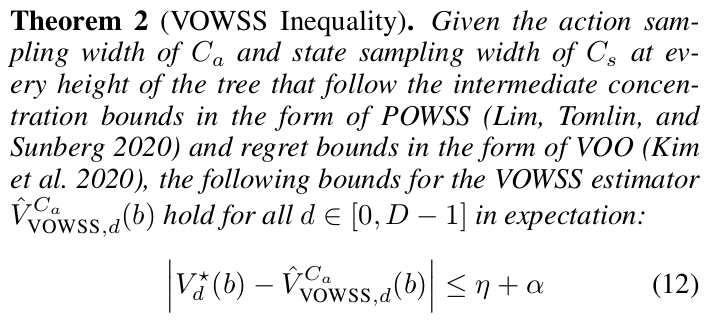
- However, our online algorithms can find \(\epsilon\)-suboptimal policies with no dependence on the size of the state or observation spaces.
[Lim, Becker, Kochenderfer, Tomlin, & Sunberg, JAIR 2023]
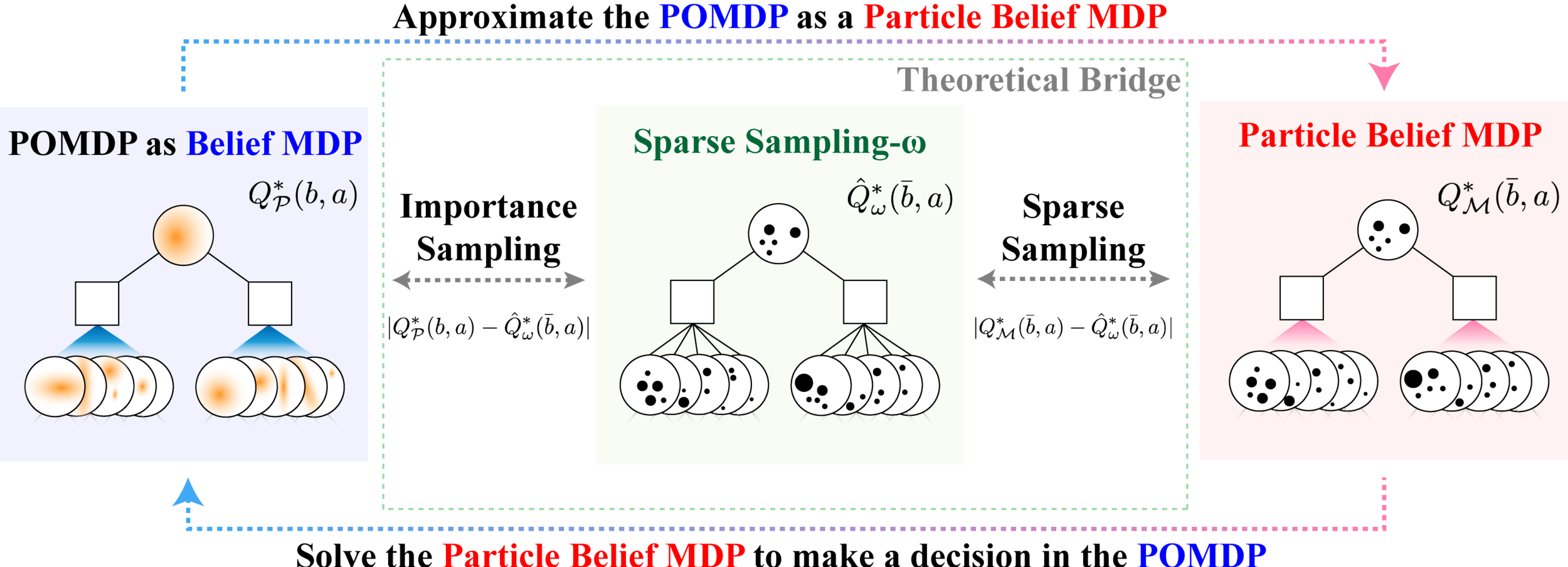
\[|Q_{\mathbf{P}}^*(b,a) - Q_{\mathbf{M}_{\mathbf{P}}}^*(\bar{b},a)| \leq \epsilon \quad \text{w.p. } 1-\delta\]
For any \(\epsilon>0\) and \(\delta>0\), if \(C\) (number of particles) is high enough,
No direct relationship between \(C\) and \(|\mathcal{S}|\) or \(|\mathcal{O}|\)

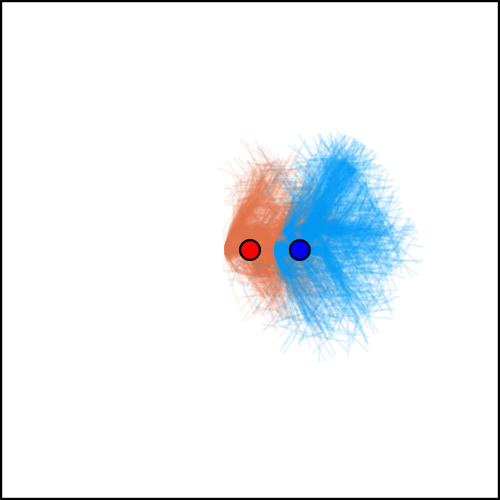
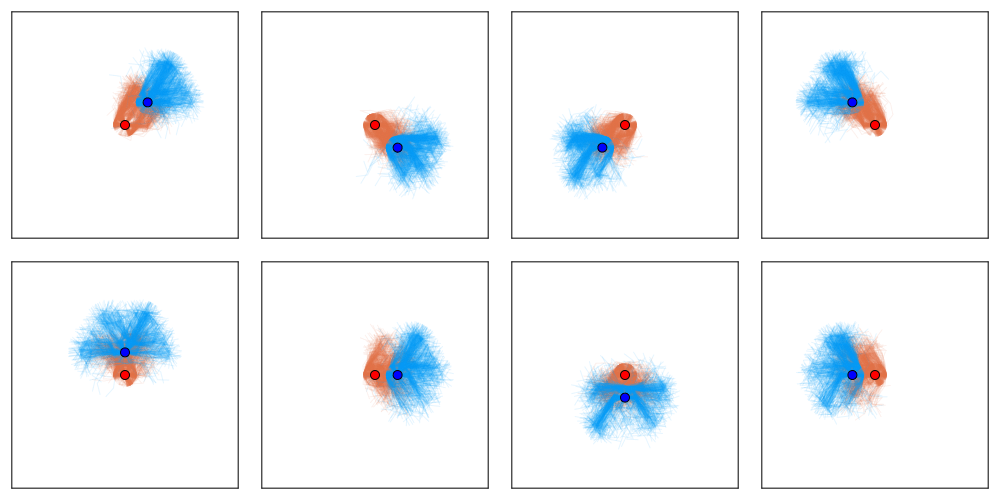
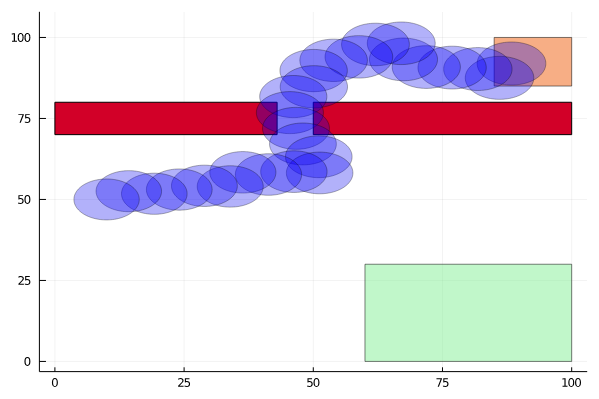
Adversarial Policies in POMDPs
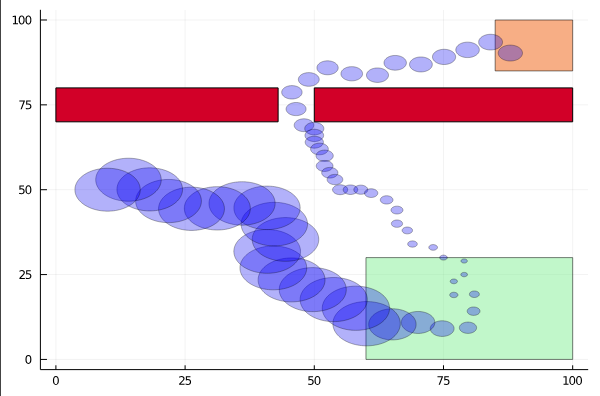
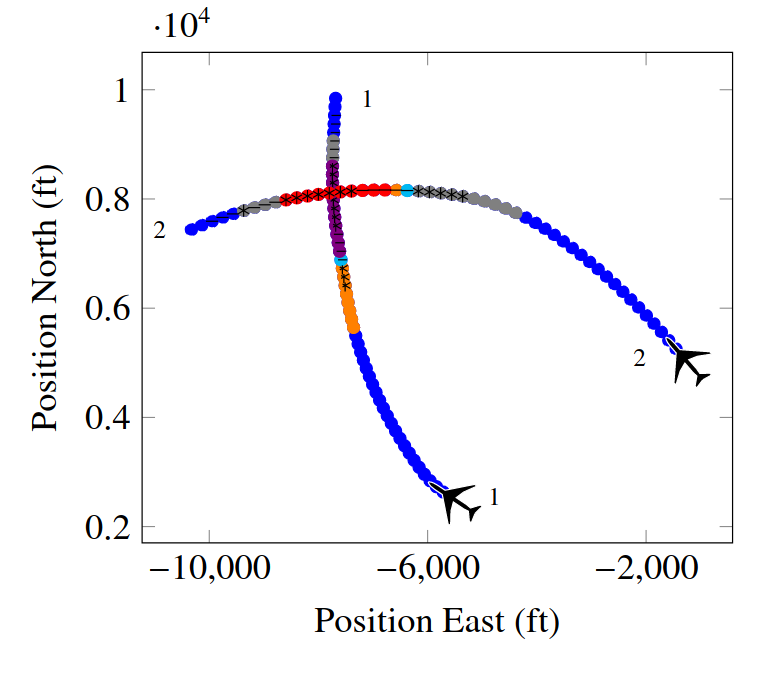
What is the worst case probabilistic model for the orange evader?

This cannot be calculated by solving a (PO)MDP!
(Every (PO)MDP has an optimal deterministic policy)
The POMDP is a good model for information gathering, but it is incomplete:
- Cannot reason about an adversary that can change their policy in response
- Cannot synthesize deceptive stochastic policies
Partially Observable Stochastic Game (POSG)
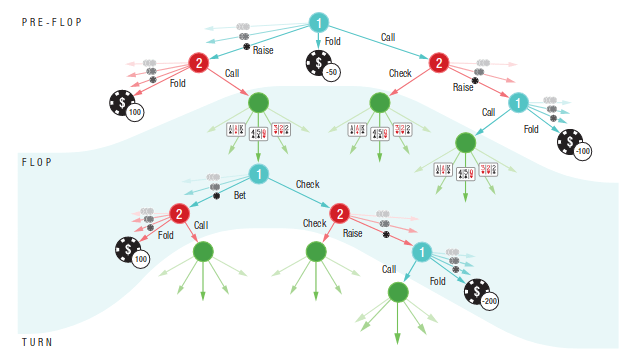
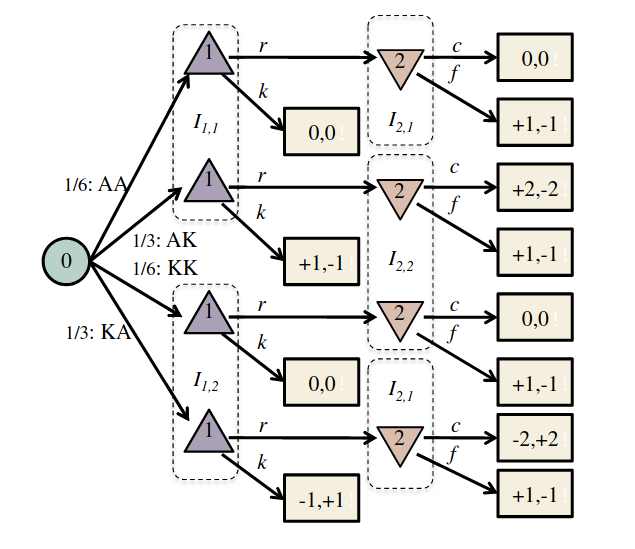
Image: Russel & Norvig, AI, a modern approach
P1: A
P1: K
P2: A
P2: A
P2: K
Planning in POSGs
Partially Observable Markov Decision Process (POMDP)
- \(\mathcal{S}\) - State space
- \(T:\mathcal{S}\times \mathcal{A} \times\mathcal{S} \to \mathbb{R}\) - Transition probability distribution
- \(\mathcal{A}\) - Action space
- \(R:\mathcal{S}\times \mathcal{A} \to \mathbb{R}\) - Reward
- \(\mathcal{O}\) - Observation space
- \(Z:\mathcal{S} \times \mathcal{A}\times \mathcal{S} \times \mathcal{O} \to \mathbb{R}\) - Observation probability distribution
Aleatory
Epistemic (Static)
Epistemic (Dynamic)
Partially Observable Stochastic Game (POSG)
Aleatory
Epistemic (Static)
Epistemic (Dynamic)
Interaction
- \(\mathcal{S}\) - State space
- \(T(s' \mid s, \bm{a})\) - Transition probability distribution
- \(\mathcal{A}^i, \, i \in 1..k\) - Action spaces
- \(R^i(s, \bm{a})\) - Reward function (cooperative, opposing, or somewhere in between)
- \(\mathcal{O}^i, \, i \in 1..k\) - Observation spaces
- \(Z(o^i \mid \bm{a}, s')\) - Observation probability distributions

[Becker & Sunberg, AAMAS 2025]
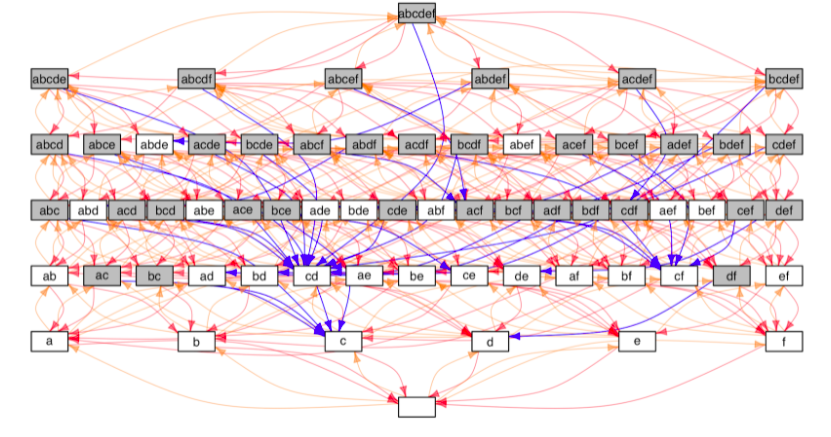
Planning in POSGs
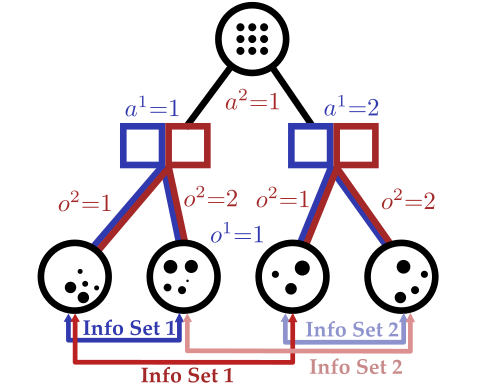
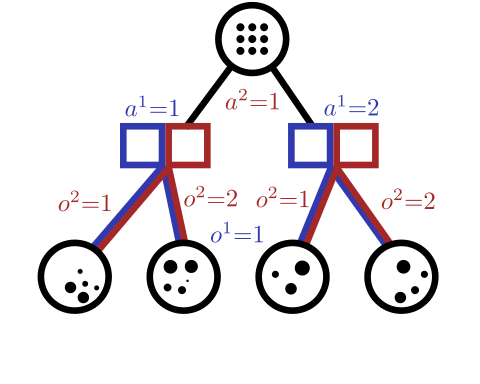
Our approach: combine particle filtering and information sets
Joint Belief
Joint Action
[Becker & Sunberg, AAMAS 2025]
Open (related) questions:
- Is this useful for continuous observations?
- What information needs to be carried step to step?
- Is this useful for games where both players know a partition of the state space exactly?
Planning in POSGs
Autonomous Decision and Control Laboratory
-
Algorithmic Contributions
- Scalable algorithms for partially observable Markov decision processes (POMDPs)
- Motion planning with safety guarantees
- Game theoretic algorithms
-
Theoretical Contributions
- Particle POMDP approximation bounds
-
Applications
- Space Domain Awareness
- Autonomous Driving
- Autonomous Aerial Scientific Missions
- Search and Rescue
- Space Exploration
- Ecology
-
Open Source Software
- POMDPs.jl Julia ecosystem
PI: Prof. Zachary Sunberg
PhD Students
Postdoc
Interaction Uncertainty


[Peters, Tomlin, and Sunberg 2020]
Space Domain Awareness Games
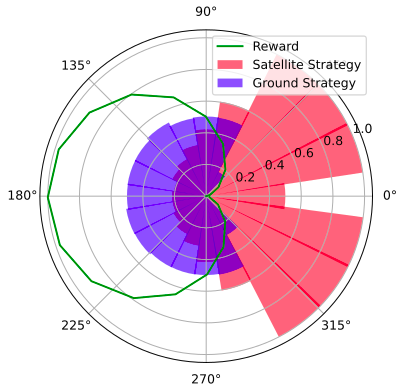
Open question: are there \(\mathcal{S}\)- and \(\mathcal{O}\)-independent algorithms for POMGs?
Incomplete Information Extensive form Game
Our new algorithm for POMGs
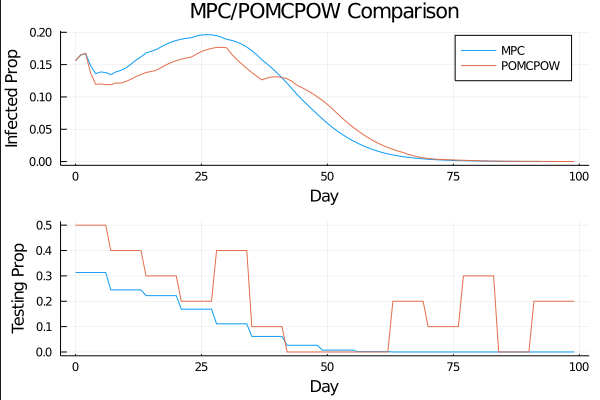
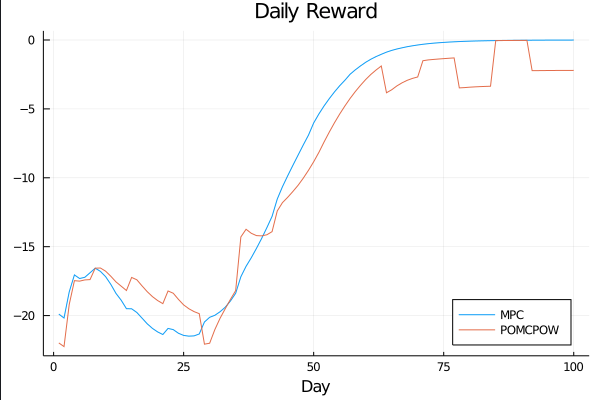
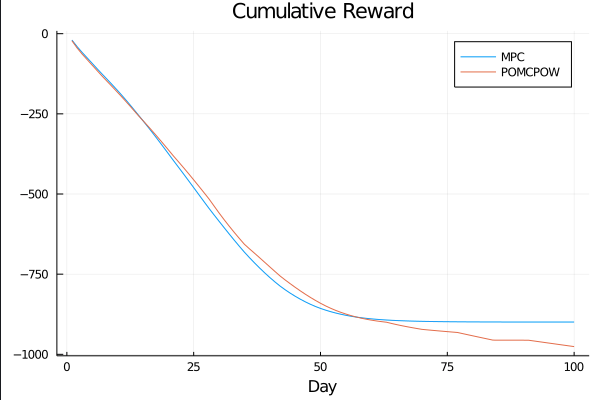
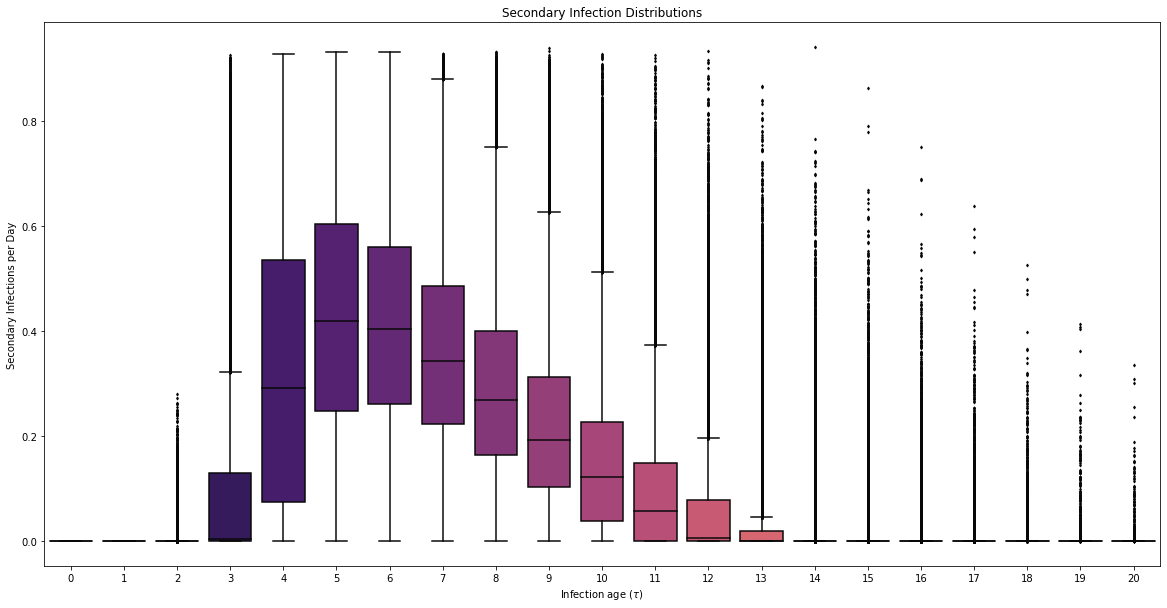
COVID POMDPs
Planning Rebuilding Ecosystems


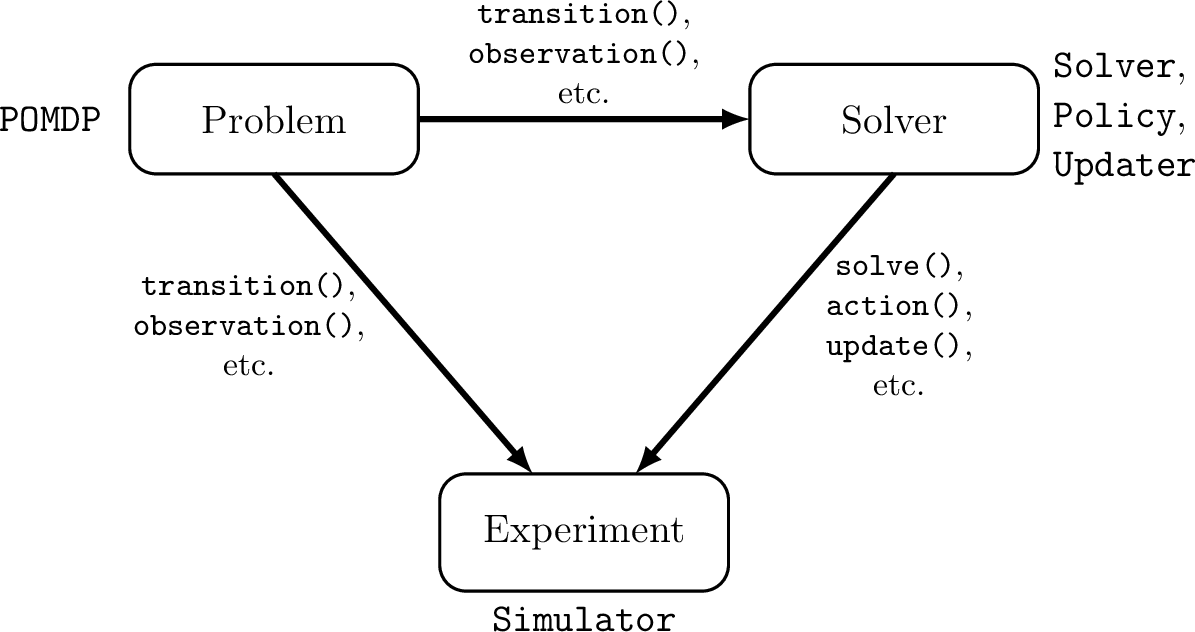
POMDPs.jl - An interface for defining and solving MDPs and POMDPs in Julia
Open Source Software


Autonomous Decision and Control Laboratory
-
Algorithmic Contributions
- Scalable algorithms for partially observable Markov decision processes (POMDPs)
- Motion planning with safety guarantees
- Game theoretic algorithms
-
Theoretical Contributions
- Particle POMDP approximation bounds
-
Applications
- Space Domain Awareness
- Autonomous Driving
- Autonomous Aerial Scientific Missions
- Search and Rescue
- Space Exploration
- Ecology
-
Open Source Software
- POMDPs.jl Julia ecosystem
PI: Prof. Zachary Sunberg
PhD Students
Postdoc
Thank You!
ADCL Students

BOMCP


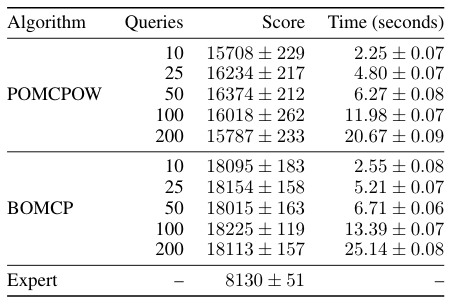
[Mern, Sunberg, et al. AAAI 2021]
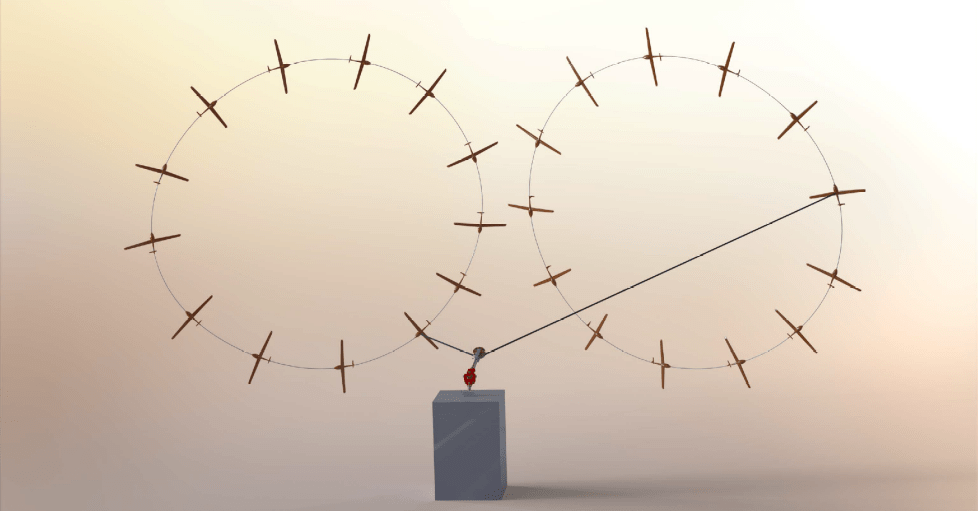
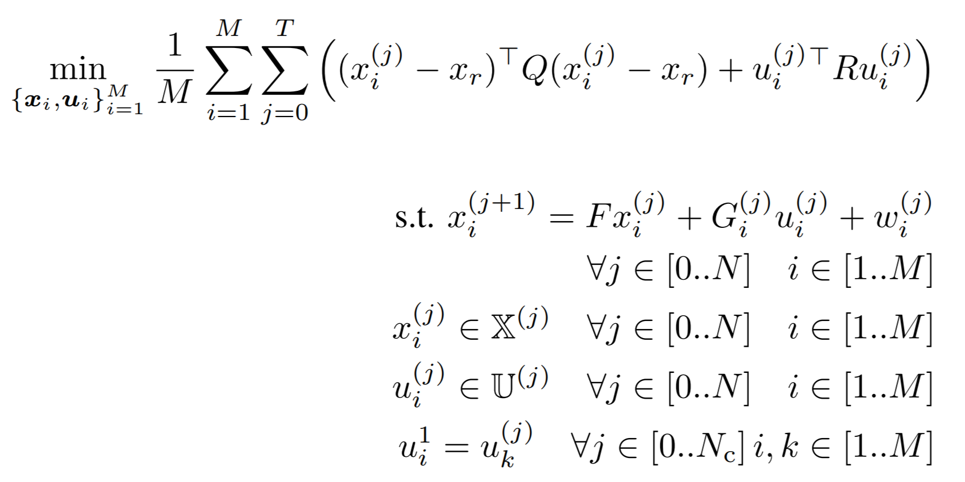
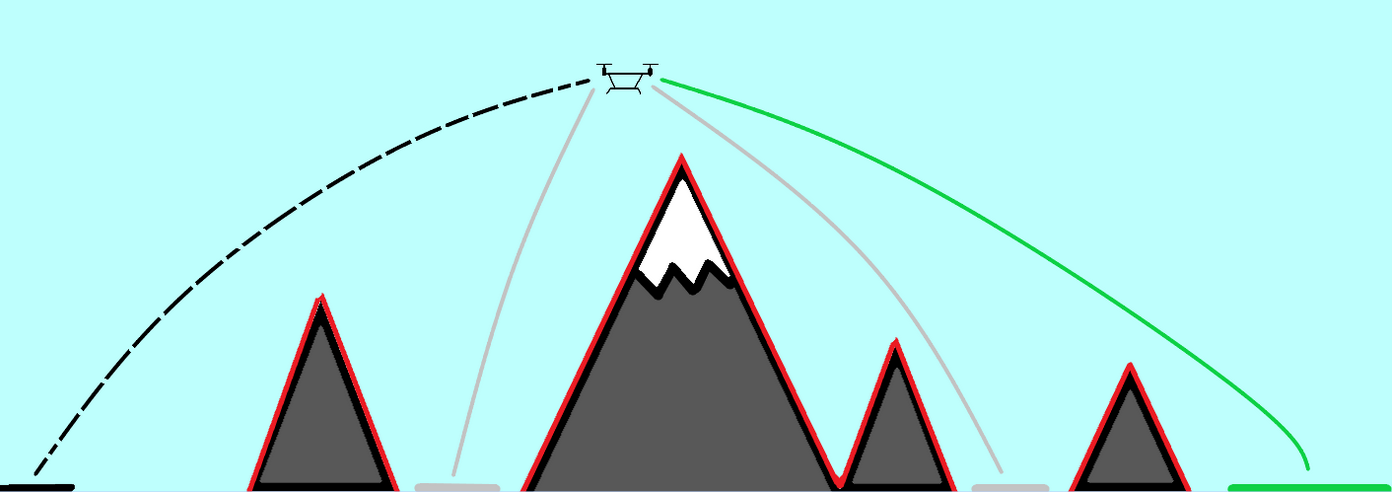
MPC for Intermittent Rotor Failures
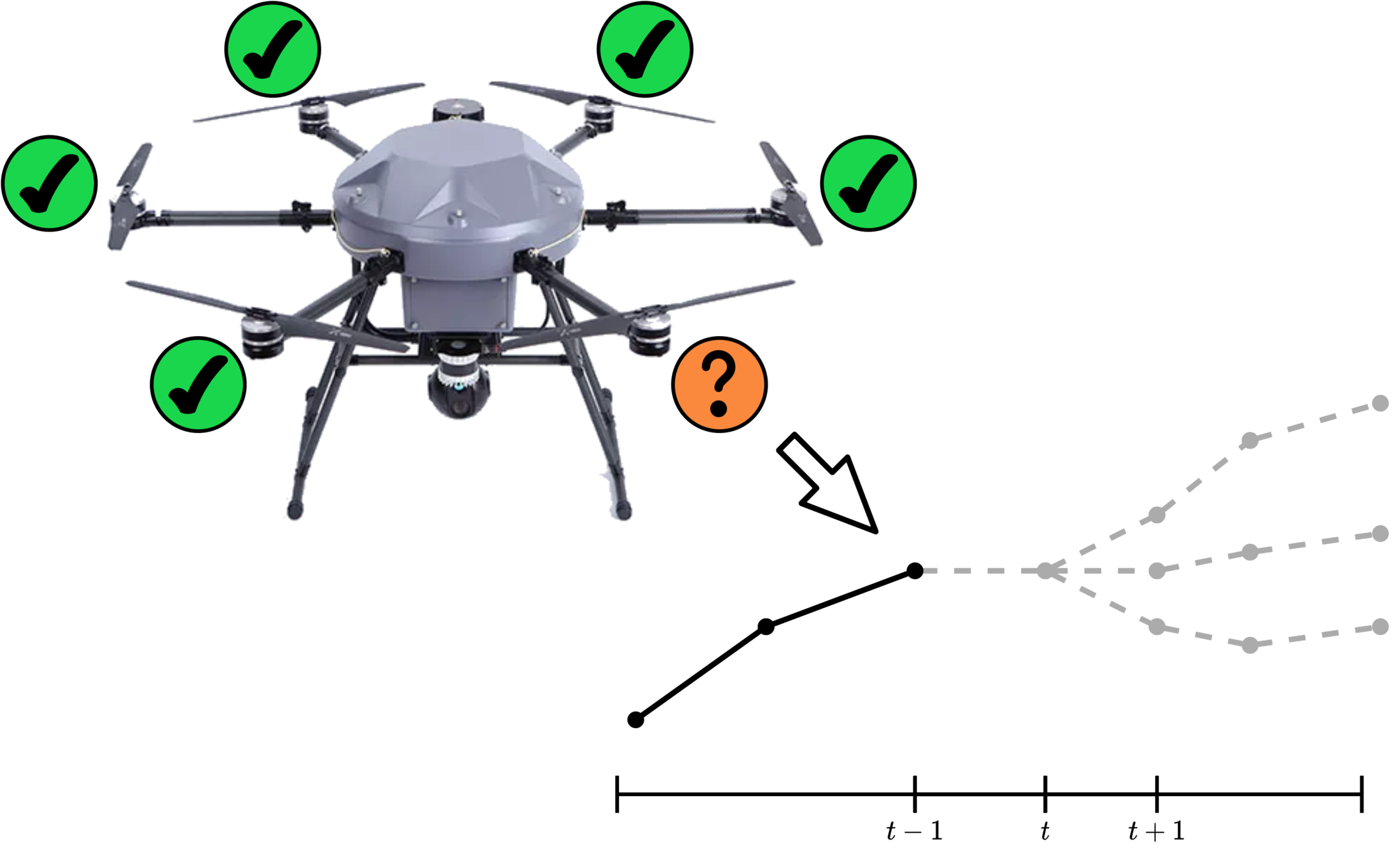
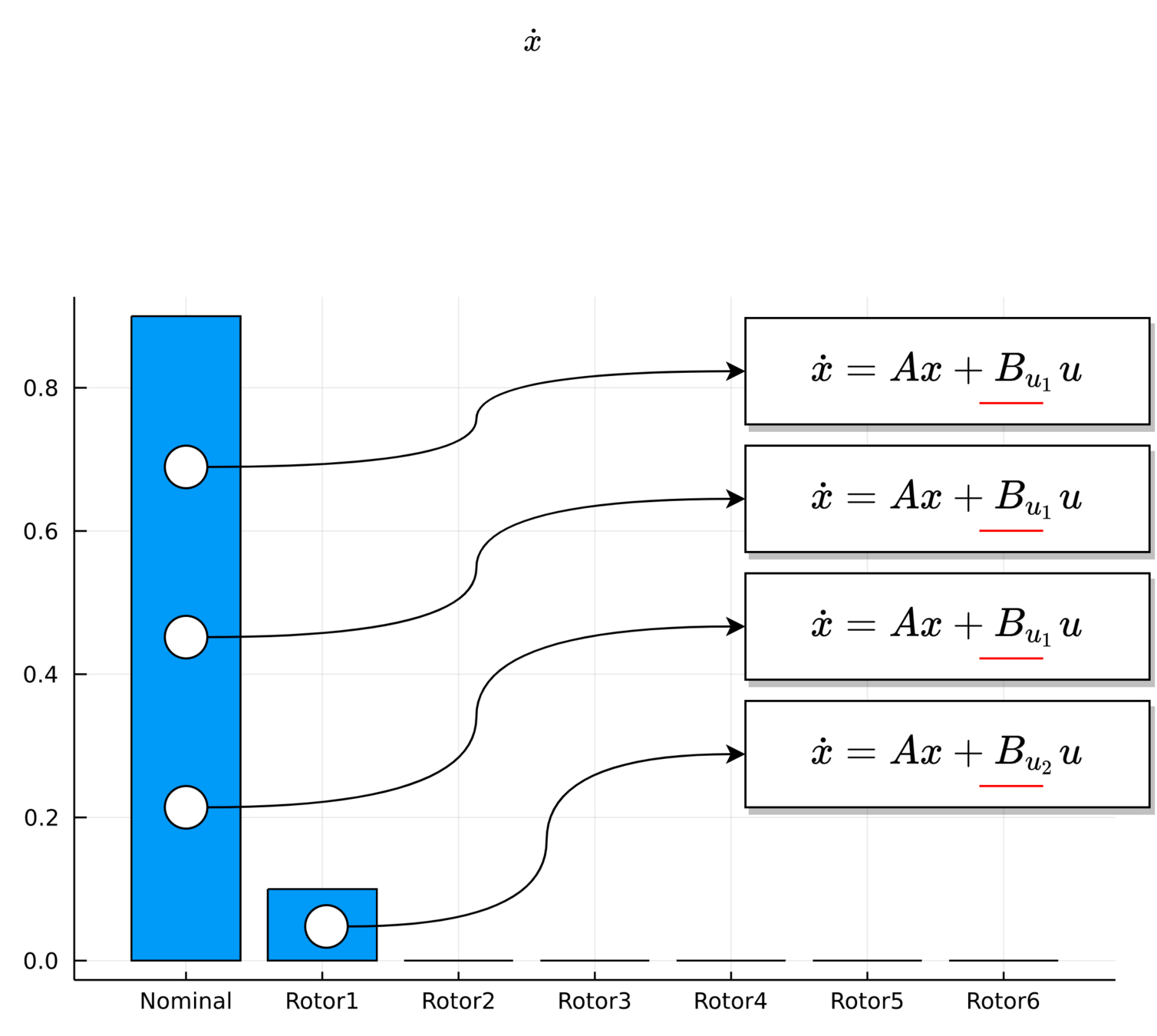
UAV Component Failures
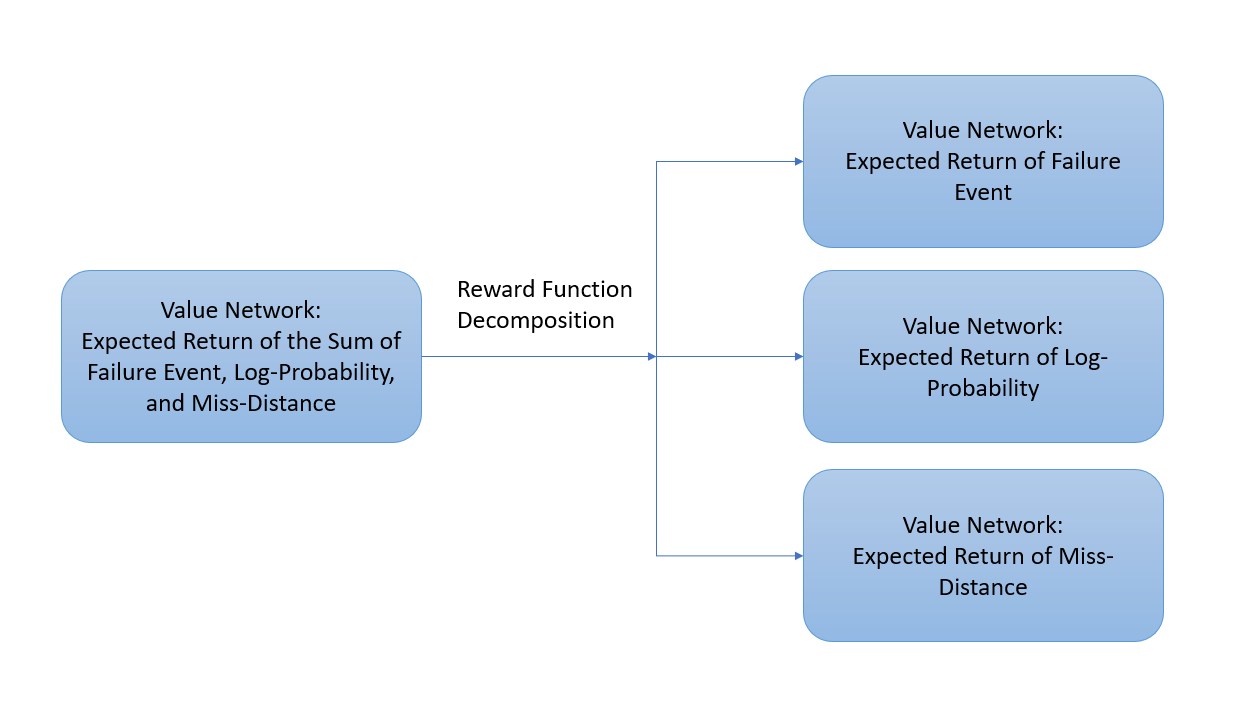
Reward Decomposition for Adaptive Stress Testing



Voronoi Progressive Widening
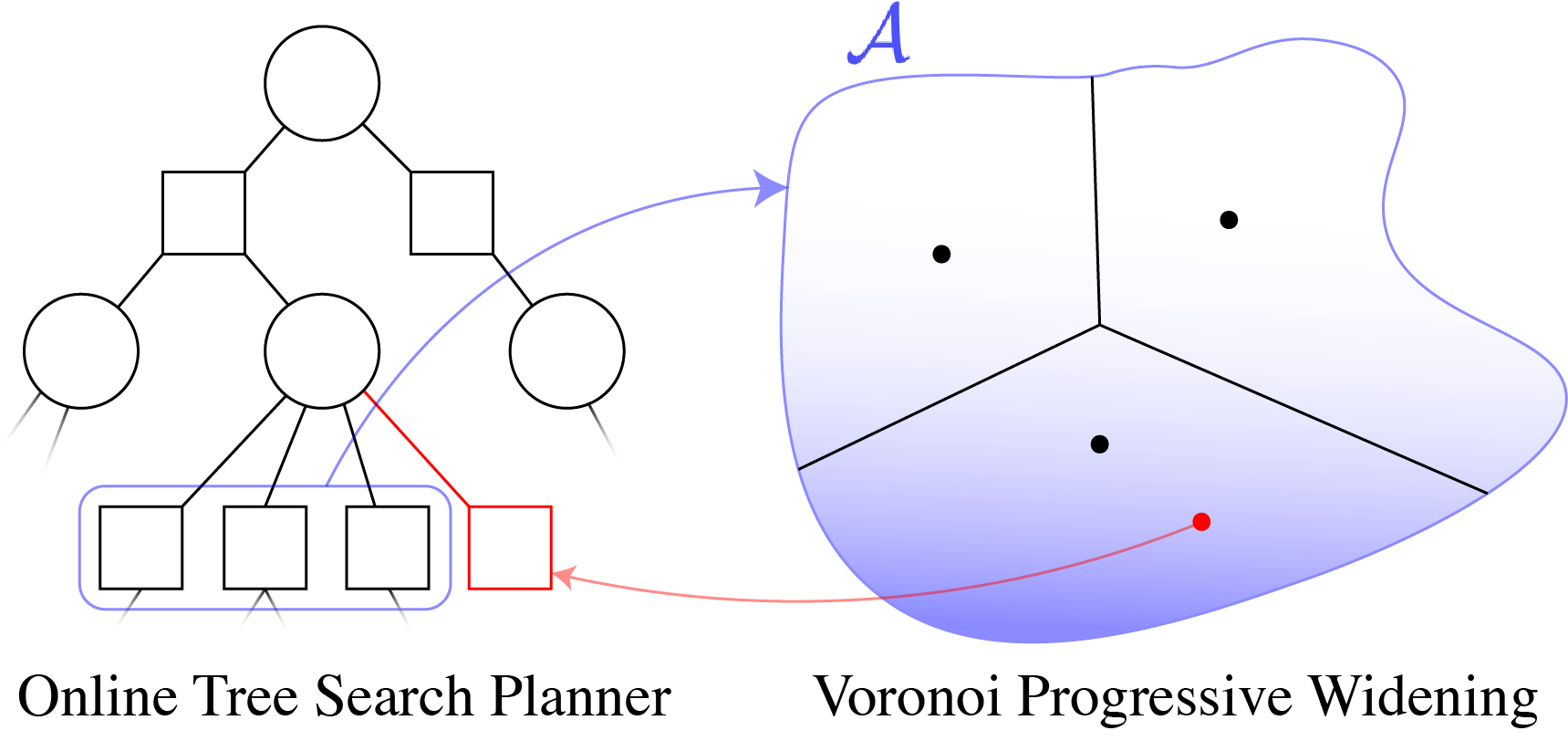
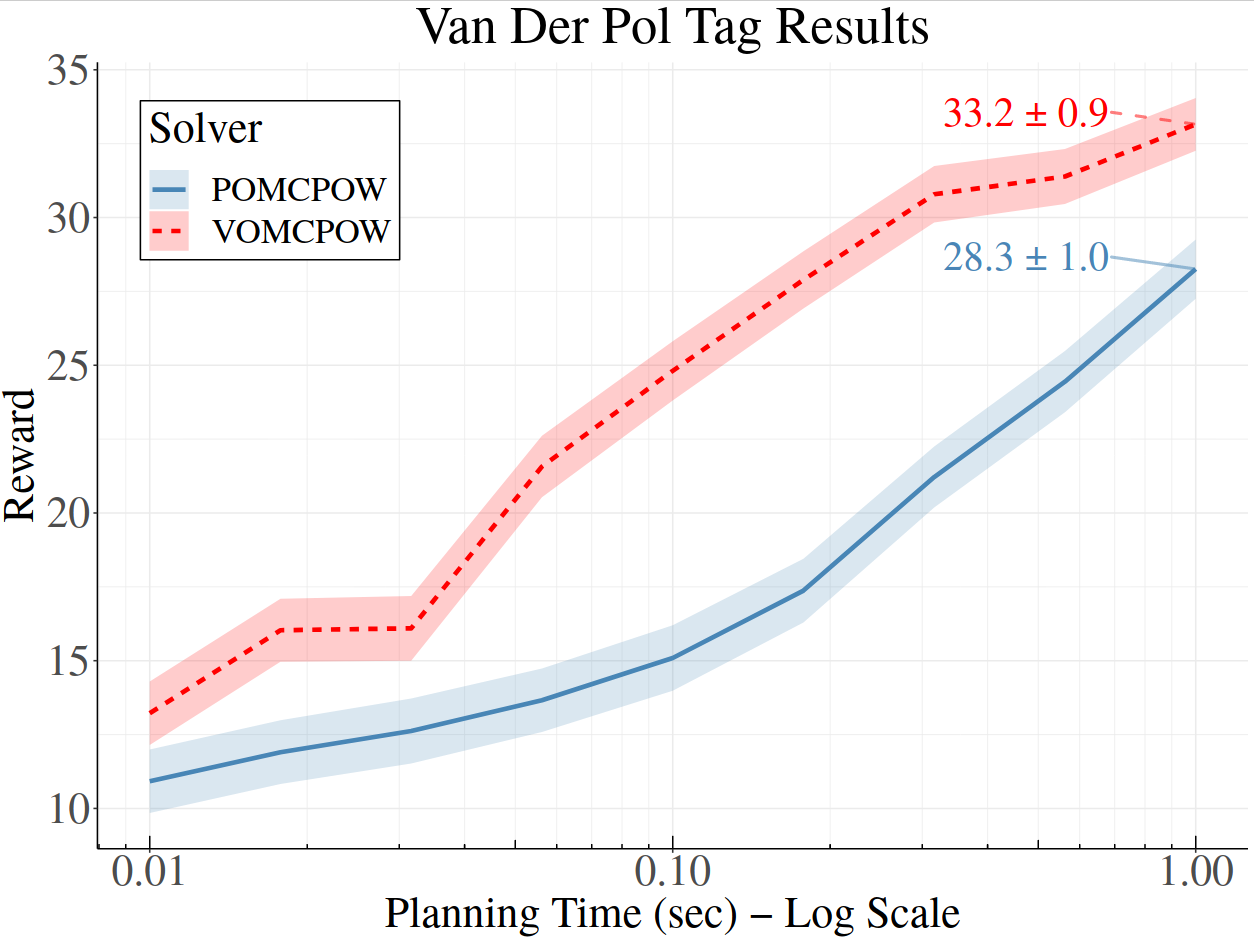
[Lim, Tomlin, & Sunberg CDC 2021]
Active Information Gathering for Safety

Sparse PFT

COVID POMDP
Individual Infectiousness
Infection Age
Incident Infections
Need
Test sensitivity is secondary to frequency and turnaround time for COVID-19 surveillance
Larremore et al.
Viral load represented by piecewise-linear hinge function