
ADCL Research Overview
Professor Zachary Sunberg
March 18th, 2022
Research Focus: Decision Making under Uncertainty
Alleatory
Epistemic (Static)
Epistemic (Dynamic)


Interaction

Markov Decision Process
Reinforcement Learning
POMDP

Game
Online Planning in Large POMDPs


Online Planning in Large POMDPs








All drivers normal





Outcome only
Omniscient
Mean MPC
QMDP
POMCPOW
Simulation results
Human Behavior Model: IDM and MOBIL

M. Treiber, et al., “Congested traffic states in empirical observations and microscopic simulations,” Physical Review E, vol. 62, no. 2 (2000).
A. Kesting, et al., “General lane-changing model MOBIL for car-following models,” Transportation Research Record, vol. 1999 (2007).
A. Kesting, et al., "Agents for Traffic Simulation." Multi-Agent Systems: Simulation and Applications. CRC Press (2009).




All drivers normal
Omniscient
Mean MPC
QMDP
POMCPOW
Efficient POMDP Approximations
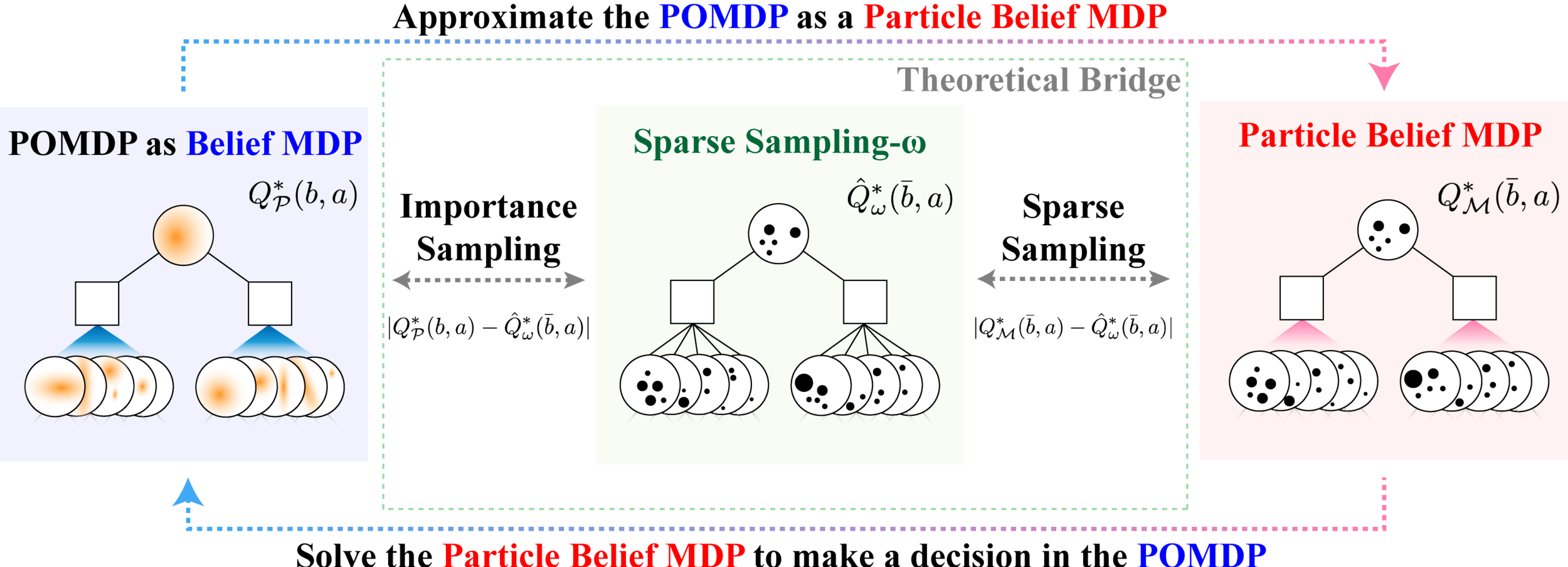
\[|Q_{\mathbf{P}}^*(b,a) - Q_{\mathbf{M}_{\mathbf{P}}}^*(\bar{b},a)| \leq \epsilon \quad \text{w.p. } 1-\delta\]
For and \(\epsilon>0\) and \(\delta>0\), if \(C\) (number of particles) is high enough,
\(\mathbf{M}_\mathbf{P}\) = Particle belief MDP approximation of POMDP \(\mathbf{P}\)
[Lim, Becker, Kochenderfer, Tomlin, & Sunberg, 2023 (?)]
No dependence on \(|\mathcal{S}|\) or \(|\mathcal{O}|\)!

Conventional 1D POMDP
2D POMDP

Online Planning in Large POMDPs


AAMAS, 2022.




Online Planning in Large POMDPs
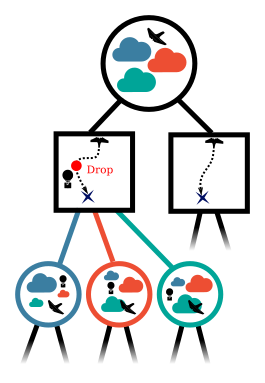
POMDP-based Weather Info-Gathering


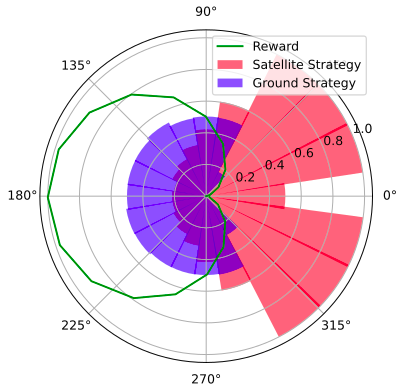
Space Domain Awareness Games
\(\mathcal{A} = \mathbb{R}^{N\times N}\)


1
2
...
...
...
...
...
...
...
\(N\)
Tyler Becker and Zachary Sunberg. “Imperfect Information Games and Counterfac-
tual Regret Minimization in Space Domain Awareness”. Abstract under review for the
Advanced Maui Optical and Space Surveillance Technologies conference.
Resolving Equilibrium Uncertainty


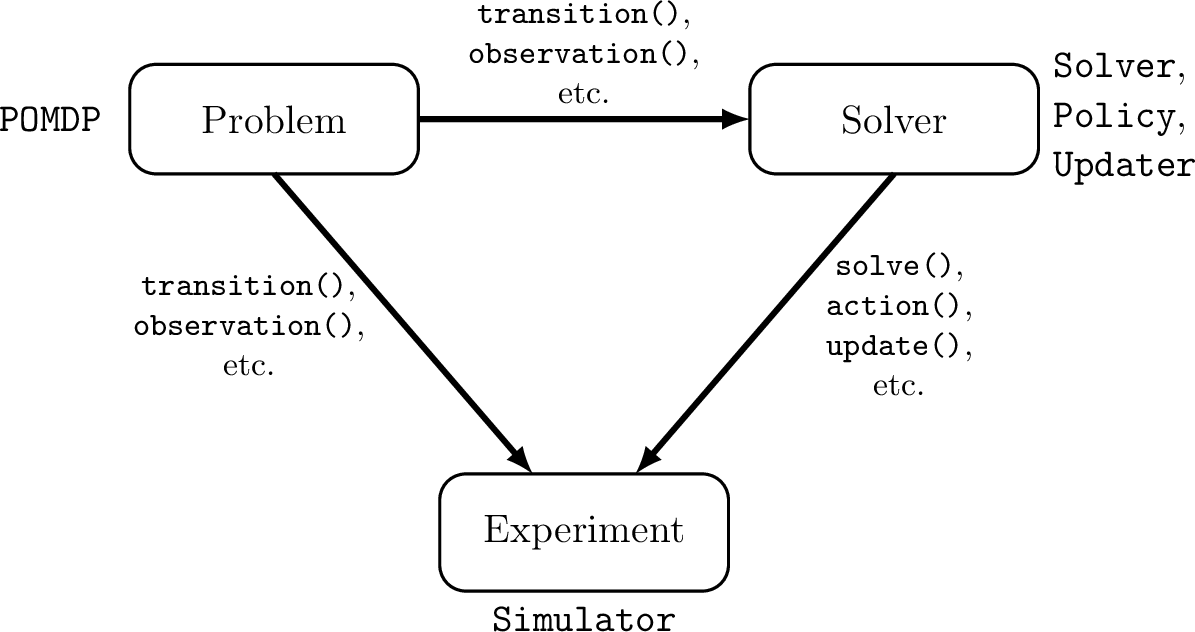
POMDPs.jl - An interface for defining and solving MDPs and POMDPs in Julia
Open Source Software


ADCL Students




Thank You!
