Dynamic Games
- Markov Games
- 2 Player zero sum turn taking games
Markov Games
Markov Game Definition
\[(I, S, A, T, R, \gamma)\]
- \(I\) = set of players
- \(S\) = state space (combined for all players)
- \(A = \{A^i\}_{i \in I}\) = joint action space
- \(T\) = transition distributions: \(T(s' \mid s, a)\) is the distribution of \(s'\) given state \(s\) and joint action \(a\)
- \(R\) = joint reward function: \(R^i(s, a)\) is the reward for agent \(i\) in state \(s\) when joint action \(a\) is taken
Markov Game Definition
Goofspiel (or Game of Pure Strategy)
- Aces Low
- One suit represents the prizes
- Each player gets the cards from one of the other suits
- At each step, one of the prize cards is presented
- Both players simultaneously present a card and the high card wins the prize
- Prizes discarded with ties
Goofspiel (or Game of Pure Strategy)
Goofspiel(5) Optimal Strategy
Calculated with Dynamic Programming [Rhoads and Bartholdi, 2012]
This is not a game payoff matrix!

Nash equilibrium at every state

Reduction to Simple Game
Reduction to Simple Game

Best response in a Markov Game
Best response in a Markov Game

Fictitious Play in a Markov Game
Loop:
1. Simulate with \(\pi^{BR}\)
2. Update \(N(j, a^j, s)\) (\(N\) should reflect *all* past simulations)
2. \(\pi^j (a^j \mid s) \propto N(j, a^j, s) \quad \forall j\)
3. \(\pi^{BR} \gets\) best response to \(\pi\)
\(\pi\) (not necessarily \(\pi^{BR}\)) converges to a Nash equilibrium in many cases, notably 2-player zero-sum games
Next year: simulate or calculate for all states - see recap slides
Fictitious Play in a Markov Game
Markov Game Recap
- Definition \((I, S, A, T, R, \gamma)\)
- Reduction to simple game
- Computing a best response means solving an MDP - know how to construct the MDP
Turn-taking Games
Terminology
- Max and Min players
- deterministic
- two player
- zero-sum
- perfect information


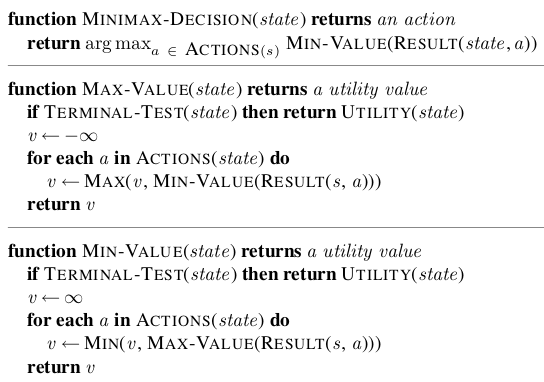
Minimax Trees
Minimax Tree
MDP Expectimax Tree
\[V(s) = \text{max}_{a \in \mathcal{A}}\left(R(s, a) + \text{E}[V(s')]\right)\]
\[V(s) = \text{max}_{a \in \mathcal{A_1}}\left(R(s, a) + \text{min}_{a' \in A_2} (R(s', a') + V(s''))\right)\]
Tic-Tac-Toe Example

Tree Backup Example
Why is this harder than an MDP? (think back to sparse sampling)
Alpha-Beta Pruning

MCTS for Games

Note: the above example does not follow UCB exploration
Imperfect Information

Partially Observable Markov Game
Belief updates?
Reduction to Simple Game
Reduction to Simple Game



Extensive Form Game
(Alternative to POMGs that is more common in the literature)
- Similar to a minimax tree for a turn-taking game
- Chance nodes
- Information sets
Extensive Form Game
(Alternative to POMGs that is more common in the literature)
- Similar to a minimax tree for a turn-taking game
- Chance nodes
- Information sets
Extensive Form Game
Extensive-form game definition (\(h\) is a sequence of actions called a "history"):
- Finite set of \(n\) players, plus the "chance" player
- \(P(h)\) (player at each history)
- \(A(h)\) (set of actions at each history)
- \(I(h)\) (information set that each history maps to)
- \(U(h)\) (payoff for each leaf node in the game tree)
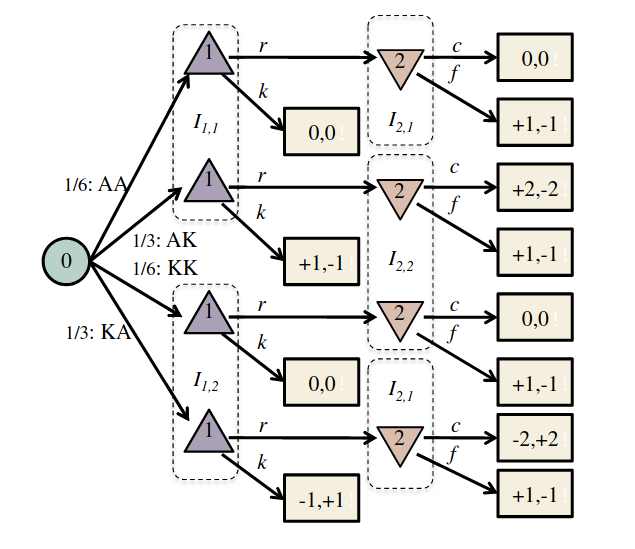
King-Ace Poker Example
- 4 Cards: 2 Aces, 2 Kings
- Each player is dealt a card
- P1 can either raise (\(r\)) the payoff to 2 points or check (\(k\)) the payoff at 1 point
- If P1 raises, P2 can either call (\(c\)) Player 1's bet, or fold (\(f\)) the payoff back to 1 point
- The highest card wins
King-Ace Poker Example
- 4 Cards: 2 Aces, 2 Kings
- Each player is dealt a card
- P1 can either raise (\(r\)) the payoff to 2 points or check (\(k\)) the payoff at 1 point
- If P1 raises, P2 can either call (\(c\)) Player 1's bet, or fold (\(f\)) the payoff back to 1 point
- The highest card wins
Extensive to Matrix Form

Exponential in number of info states!
Fictitious Play in Extensive Form Games
This slide not covered on exam

Heinrich et al. 2015 "Fictitious Self Play in Extensive-Form Games"