Actor-Critic
Reward Shaping
Advanced Exploration Entropy Regularization
Map
Challenges:
- Exploration vs Exploitation
- Credit Assignment
- Generalization
- Actor-Critic
- Reward Shaping
- Advanced Exploration
- Entropy Regularization
- Wisdom
1. Actor-Critic
\[\nabla U(\theta) = E_\tau \left[\sum_{k=0}^d \nabla_\theta \log \pi_\theta (a_k \mid s_k) \gamma^{k} (r_{k,\text{to-go}}-r_\text{base}(s_k)) \right]\]
Advantage Function: \(A(s, a) = Q(s, a) - V(s)\)
- Actor: \(\pi_\theta\)
- Critic: \(Q_\phi\) and/or \(A_\phi\) and/or \(V_\phi\)
Can we combine value-based and policy-based methods?
Alternate between training Actor and Critic
Problem: Instability
Actor-Critic
Which should we learn? \(A\), \(Q\), or \(V\)?
\[\nabla U(\theta) = E_\tau \left[\sum_{k=0}^d \nabla_\theta \log \pi_\theta (a_k \mid s_k) \gamma^{k} (r_k + \gamma V_\phi (s_{k+1}) - V_\phi (s_k))) \right]\]
\(l(\phi) = E\left[\left(V_\phi(s) - \hat{V}^{\pi_\theta}(s)\right)^2\right]\)
Generalized Advantage Estimation
\(A(s_k, a_k) \approx r_k + \gamma V_\phi (s_{k+1}) - V_\phi (s_k)\)
\(A(s_k, a_k) \approx \sum_{t=k}^\infty \gamma^{t-k} r_t\)
\(A(s_k, a_k) \approx \left(\sum_{t=k}^{d-1} \gamma^{t-k} r_t \right) + \gamma^{d-k} r_d + \gamma V_\phi (s_{d+1}) - V_\phi (s_d)\)
let \(\delta_t = r_t + \gamma V_\phi (s_{t+1}) - V_\phi (s_t)\)
\[A_\text{GAE}(s_k, a_k) \approx \sum_{t=k}^\infty (\gamma \lambda)^{t-k} \delta_t\]
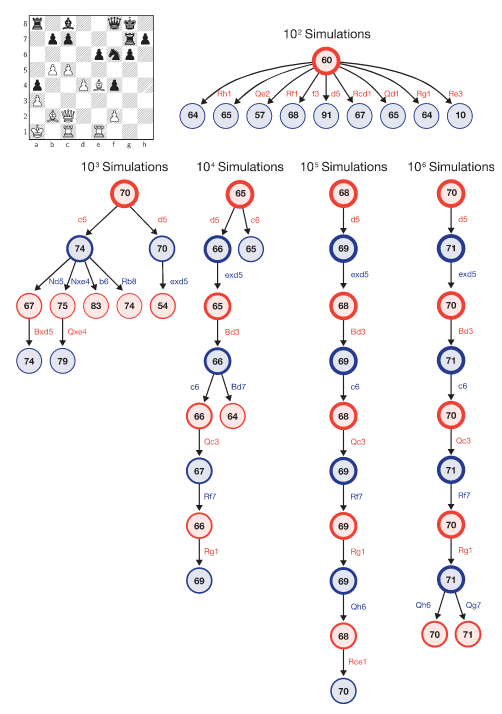
Alpha Zero: Actor Critic with MCTS
- Use \(\pi_\theta\) and \(U_\phi\) in MCTS
- Learn \(\pi_\theta\) and \(U_\phi\) from tree





Alpha Zero: Actor Critic with MCTS
2. Reward Shaping


Which is easier to learn on?
Sparse Reward
Dense Reward
https://www.youtube.com/watch?v=tlOIHko8ySg
Coast Runners 7: A Cautionary Tale
CoastRunners 7
Reward Shaping
"As a general rule, it is better to design performance measures according to what one actually wants in the environment, rather than according to how one thinks the agent should behave." - Stuart Russell
Reward
Value
Potential-Based Reward Shaping
- \(R'(s, a, s') = R(s, a, s') + \gamma \Phi(s') - \Phi(s)\)
- any other transformation may yield sub optimal policies unless further assumptions are made about the underlying MDP
Continuous Actions: Deep Deterministic Policy Gradient
Is Exploration Important?
Montezuma's Revenge
Is Exploration Important?
Theory

Exploration Bonus
- In General, \(R^+(s, a) = R(s, a) + B(s, a)\)
- UCB: \(B(s, a) = c \sqrt{\frac{\log N(s)}{N(s, a)}}\)
Example 1: Learn Pseudocount
\(B(s, a) \approx \frac{1}{\sqrt{\hat{N}(s)}}\) where \(\hat{N}(s)\) is a learned function approximation



Bellemare, et al. 2016 "Unifying Count-Based Exploration..."
Exploration Bonus
Example 2: Learn a function of the state and action
\(B(s, a) = \lVert \hat{f}_\theta (s, a) - f^*(s, a) \rVert^2\)
What should \(f^*\) be?
- \(f^*(s, a) = s'\) (Next state prediction)
- \(f^*(s, a) = f_\phi (s, a)\) where \(f_\phi\) is a random neural network.
Exploration Bonus
Example 3: Thompson Sampling
- Maintain a distribution over \(Q\)
- Sample \(Q\)
- Act according to \(Q\)
- Bootstrapping with multiple \(Q\) networks
- Dropout
Exploration Bonus
Example 4: Go-Explore

"First return, then explore"

(Uber AI Labs)
Entropy Regularization
\[U_H(\pi) = E \left[\sum_{t=0}^\infty \gamma^t \left(r_t + \alpha H(\pi(\cdot \mid s_t))\right)\right]\]
Entropy (for a discrete RV):
\[H(X) = E\left[\log_2 \left(\frac{1}{P(X)}\right)\right] = \sum_x P(x) \log_2 \left(\frac{1}{P(x) }\right)\]
\(X \sim \text{Bernouli}(0.1)\)
\(H(X) = 0.47\)
\(Y \sim \text{Bernouli}(0.5)\)
\(H(Y) = 1.0\)
Entropy-Regularized Utility:
Soft Actor Critic: Entropy Regularization
\[U(\pi) = E \left[\sum_{t=0}^\infty \gamma^t \left(r_t + \alpha \mathcal{H}(\pi(\cdot \mid s_t))\right)\right]\]



Test
Soft Actor Critic





Soft Actor Critic
Advantages:
- Stable
- Learns many near-optimal policies
- Exploration
- Insensitivity to hyperparameters
- Off-Policy

Disadvantages
- Sensitive to \(\alpha\) Solution = Entropy *constraint* and adjust \(\alpha\)
Wisdom
Deep RL: The Dream

Using Deep RL for your problem
- Some interesting problem (smallsat swarm)
- Spend weeks theorizing about the exact-right cost function and dynamics
- Decide RL can solve all of your problems
- Fire up open-ai baselines
- Does it work??



Why not?
- Hyperparameters?
- Reward scaling?
- Not enough training time????
Algorithms

Policy Network Architecture

Reward Rescaling

"simply multiplying the rewards generated from an environment by some scalar"
Statistical Significance

"Unfortunately, in recent reported results, it is not uncommon for the top-N trials to be selected from among several trials (Wu et al. 2017; Mnih et al. 2016)"
Codebases

How to choose an RL Algorithm
(According to Sergey Levine)

Model-Based RL
Model-Based Deep RL
Off-Policy
Q-Learning
Actor Critic
On Policy Policy Gradient
Evolutionary/Gradient Free
(Most people use SAC or PPO)
How to be successful with RL
- Always start with a small problem that works and scale up (keep verifying that it works with every change)
- Plot everything that you can think of (TensorBoard)
- *Losses*
- Policies
- Value functions
- Trajectories
- (Average return) Learning curve
- Keep calm and lower your learning rate

Where Does RL Work?
- Cooling servers
- Winning at Go

