Neural Network Function Approximation
Map of RL Algorithms
Last Time
This Time
Challenges in Reinforcement Learning:
- Exploration vs Exploitation
- Credit Assignment
- Generalization
Function Approximation
\(y \approx f_\theta(x)\)
Previously, Linear:
\[f_\theta(x) = \theta^\top \beta(x)\]
e.g. \(\beta_i(x) = \sin(i \, \pi \, x)\)
AI = Neural Nets
Neural Nets are just another function approximator
Neural Network

\(h(x) = \sigma(Wx + b)\)
Neural Network
\(h(x) = \sigma(Wx + b)\)
Neural Network
\(h(x) = \sigma(Wx + b)\)
\(f_\theta(x) = h^{(2)}\left(h^{(1)}(x)\right)\)
\(= \sigma^{(2)}\left(W^{(2)} \sigma^{(1)}\left(W^{(1)} x + b^{(1)}\right) + b^{(2)}\right)\)
\(\theta = (W^{(1)}, b^{(1)}, W^{(2)}, b^{(2)})\)
Nonlinearities

Training
\[\theta^* = \argmin_\theta \sum_{(x,y) \in \mathcal{D}} l(f_\theta(x), y)\]
Stochastic Gradient Descent: \(\theta \gets \theta - \alpha \, \nabla_\theta\, l (f_\theta(x), y)\)
Chain Rule
Chain Rule

Example:
\[\hat{y} = W^{(2)} \sigma (W^{(1)} x + b^{(1)}) + b^{(2)}\]
\[\frac{\partial l}{\partial W^{(2)}} =\]
\[\frac{\partial l}{\partial \hat{y}} \left(\frac{\partial \hat{y}}{\partial W^{(2)}}\right)\]
\[ = \frac{\partial l}{\partial \hat{y}}\, \sigma\left(W^{(1)} x + b^{(1)}\right)^\top\]
\[W^{(2)} \gets W^{(2)} - \alpha \frac{\partial l}{\partial W^{(2)}}\]
(assume \(\hat{y}\) is scalar)
Automatic Differentiation
Backprop




a “fast and furious” approach to training neural networks does not work and only leads to suffering. Now, suffering is a perfectly natural part of getting a neural network to work well, but it can be mitigated by being thorough, defensive, paranoid, and obsessed with visualizations of basically every possible thing. The qualities that in my experience correlate most strongly to success in deep learning are patience and attention to detail.
- Andrej Karpathy
Adaptive Step Size: RMSProp
Adaptive Step Size: RMSProp


Adaptive Step Size: ADAM

(Adaptive Moment Estimation)
Adaptive Step Size: ADAM

Circle dot is elementwise product

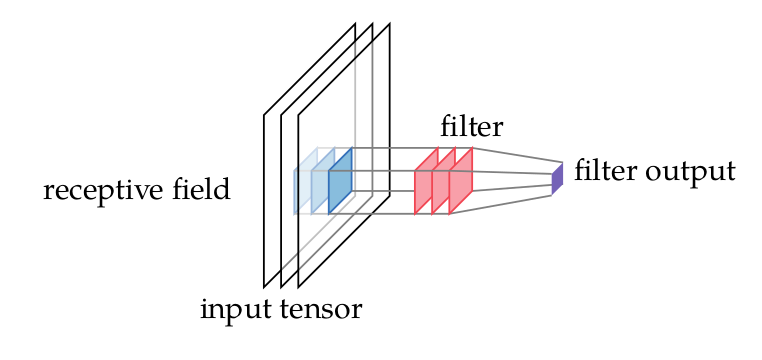
On Your Radar: ConvNets


On Your Radar: Regularization
e.g. Batch norm, layer norm, dropout

On Your Radar: Skip Connections (Resnets)
Resources
OpenAI Spinning up